机械原理平面机构的结构分析
难点1
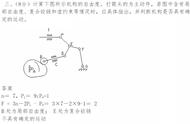
自由度的计算;
做空间运动的构件有6个自由度。
做平面运动的构件有3个自由度。
假设活动构件数为n,高副数为Ph 低副数为Pl
则运动链的自由度为
F= 3n-2P1-Ph
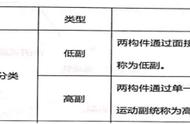
其中的点线接触为低副;面接触为高副。
在计算运动副时应该注意以下情况;
1;注意复合铰链;
2;注意局部自由度;
3;注意虚约束;
机械原理平面机构的结构分析
难点1
自由度的计算;
做空间运动的构件有6个自由度。
做平面运动的构件有3个自由度。
假设活动构件数为n,高副数为Ph 低副数为Pl
则运动链的自由度为
F= 3n-2P1-Ph
其中的点线接触为低副;面接触为高副。
在计算运动副时应该注意以下情况;
1;注意复合铰链;
2;注意局部自由度;
3;注意虚约束;












Copyright © 2018 - 2021 www.yd166.com., All Rights Reserved.
