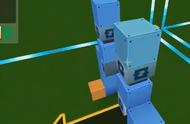
在迷你世界中,玩家熟悉了基本机械组件玩法之后,可以尝试做一些控制连贯动作的机械装置。比如说做一个能直立行走的机器人,还能变形成为爬行恐龙。要设计出这样一个机器人,玩家可以采取不同的方式。如果要让机器人行走时更像那么回事,玩家可以将机器人的腿部设计的长一些,整个躯干部分设计的宽一些,这样也更加稳定。首先在机械车间放几个方块,做一个面积不算太小的机器人脚出来。放上一个向上的铰链,再连接一段较短的方块条。再次放上一个铰链,然后再连接一小段方块条。用地形编辑器复制这条腿到边上,然后在两条腿的上面,用方块横向铺设将其连接起来。中间放一个铰链,控制机器人的上部弯曲,以实现变形成爬行状态。

至于机器人的躯干如何设计,这就看玩家要做一个多高的机器人了。用方块做一个立方体的躯干出来,在后面向后放置一个铰链,然后做一条尾巴。在躯*上面,放一个向上的铰链,再向前用方块做出机器人的头部出来。这里设计的是一个能变形成恐龙的机器人,头部可以按照恐龙的头部形状来设计。在躯*左右两边放置各一个向外侧的转轴,再往下连接一小段方块条。中间用铰链连接一下,做一个可活动的关节。机器人的各部分设计完成后,接下来就是控制各部分活动的设置。

机器人形态主要是控制行走,玩家也可以控制机器人手臂摆动。脚部的四个铰链,玩家可以设置成小幅角度摆动,角度设置方法,可以参考一般走路的姿势。一条腿向前迈出,同时另一条腿向后运动。角度设置小一些,主要是为了让机器人走起来更稳定。用序列器控制四个铰链实现一次完整的循环动作。躯干下面的那个铰链,主要是变形的时候发挥作用,用序列器控制铰链转动一定角度,让机器人能够趴在地上。

因为机器人的脚比较长,爬行时用手来产生前进动作。手部的两个转轴和两个铰链,同样是按照脚部的铰链来设置动作。变形的时候,先要用序列器控制手臂向前伸直,然后控制躯干下部的铰链向前转动。变形成爬行状态后,玩家用序列器控制机器人的头部向前抬起,这样就能变形成爬行恐龙。

这样一个机器人,控制起来难度比较大,如果让新手来尝试,可能还很难操控前进。而且它不能再次站立,玩家可以对此作出改进,加入滑动方块设计。用序列器控制滑动方块滑动,实现机器人上部抬起从而能够爬起来。不过爬起这个动作更难设计,玩家可能要尝试多次,才能获得想要的效果。

做这样一个机器人,玩家能够从中对设计协调动作的装置有更深的理解。这样来看,迷你世界确实也是一款有较大难度的游戏。只不过它上手比较简单,即使玩家没法做出这样的复杂机器人,也能做一些简单的装置获得很大游戏乐趣。
,