3D成像关键技术,主要有四种关键技术:立体视觉、结构光3D成像、激光三角形测量、TOF,后面三个是主动成像,需要外加光源来实现。
立体视觉我们也许在很多场合中看到过这样的场景,安装两个摄像机才能获得物体的不同视角。校准(标定)技术用于在摄像机之间对齐像素信息并提取有关深度的信息,类似于我们的大脑如何以视觉方式测量距离。将认知过程转换为系统需要大量的计算工作。

体视觉成像
这种系统使用标准的工业相机或者其他相机,因此可以降低成本。传感器(例如高性能传感器或全局快门)越复杂,系统成本就越高。距离范围受到机械约束的限制:对物理基线的要求导致需要更大尺寸的模块。还需要精确的机械对准和重新校准。另外,该技术在恶劣或变化的光照条件下效果不佳,并且非常取决于物体的反射特性。
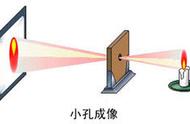
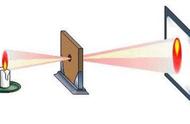
结构光成像在结构光中,将预定的光图案投影到物体上,比如格雷码,并且通过分析图案如何变形来获得深度信息。帧时间没有概念上的限制,没有运动模糊,并且它对多路径接口具有鲁棒性。主动照明需要复杂的照相机,并且还需要透镜与图案投影仪之间精确且稳定的机械对准。存在失准的风险,并且反射的图案对环境中的光学干扰敏感,并且仅限于室内应用。

结构光成像技术
投影结构光3D图像捕获方法的原理。(a)将照明图案投射到场景上,并用相机捕获反射图像。一个点的深度取决于它在图案和图像中的相对位移。(b)投影条纹图案比如格雷码。(c)从3D对象反射的条纹图案的捕获图像。

格雷码
激光三角测量激光三角测量系统测量一条线的几何偏移,该线的值与物体的高度有关。它是基于对象扫描的一维成像技术。根据激光照射表面的距离,激光点会出现在相机视场的不同位置。由于激光点,相机和激光发射器形成三角形,因此该技术被称为三角测量。可以使用经典的高速全局快门传感器,但是专用传感器将获得更好的精度和速度性能。

激光三角法
高分辨率激光器通常用于需要高精度,稳定性和低温漂移的位移和位置监控应用中。不利的一面是,该技术仅覆盖近距离,对环境光敏感,并且仅限于扫描应用。还需要复杂的算法和校准。另外,该技术对结构化或复杂的表面敏感。
飞行时间这项技术代表了所有方法,这些方法实现了从相机和场景之间直接获取距离的测量或光子双倍飞行时间的计算。可以直接(D-ToF)或间接(I-ToF)进行此测量。D-ToF概念很简单,但是需要复杂且受时间限制的设备,而I-ToF可以以更简单的方式操作:光源与图像传感器同步。光脉冲与相机的快门相位同步发射。光脉冲去同步用于计算光子的ToF,这使得可以推断出发射点和物体之间的距离。

TOF
这样可以确保直接测量每个像素的深度和幅度。该图像称为深度图。该系统具有较小的纵横比,单眼方法以及一生一次的轻松校准,并且在环境光条件下也能很好地运行。缺点包括需要主动照明同步以及潜在的多径干扰和距离混叠。
免责声明:版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将第一时间处理。