2. 导入三个工具并安装到3台机器人上
3. 制作产品工件,并安装到机器人1上

4. 从布局创建系统,其中第一台机器人持有工件
5. 激活T_ROB2,即在第二台机器人下,在1号机器人持有的工件下做工件坐标系,其中,坐标系由ROB_1驱动


6. 2号机器人在这个坐标系完成轨迹。
7. 同理完成3号和4号机器人轨迹
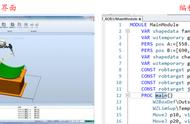
8. 点击multimove按钮

2. 导入三个工具并安装到3台机器人上
3. 制作产品工件,并安装到机器人1上
4. 从布局创建系统,其中第一台机器人持有工件
5. 激活T_ROB2,即在第二台机器人下,在1号机器人持有的工件下做工件坐标系,其中,坐标系由ROB_1驱动
6. 2号机器人在这个坐标系完成轨迹。
7. 同理完成3号和4号机器人轨迹
8. 点击multimove按钮











Copyright © 2018 - 2021 www.yd166.com., All Rights Reserved.