2021年,2021款理想ONE在车上搭载了800万像素摄像头。随后,极氪001,蔚来ET7先后宣布搭载7颗800万像素摄像头。即将发布的理想L9、小鹏G9也将搭载800万像素的摄像头。不少即将发布的高端智能汽车也将采用800万像素摄像头作为主要传感器方案。
作为智能汽车使用最多的传感器,车载摄像头的数量越来越多,用途越来越广泛,并且像素级也越来越高。与前几代摄像头相比,800万像素的摄像头有哪些优势?主要用来干什么?给智能汽车带来怎样的体验?
还是老规矩,深入探讨800万像素车载摄像头之前,我们先对车载摄像头做一些基本的信息科普。
摄像头的构成有哪些?作用分别是什么?
车载摄像头主要包含5个部分:

光学镜头:负责聚焦光线,将物体投射到成像介质表面,根据成像效果的要求不同,可能要求多层光学镜片。其中的滤光片可以将人眼看不到的光波段进行滤除,只留下人眼视野范围内的实际景物的可见光波段。
图像传感器:常见的有CCD 和 CMOS 两种,它可以利用光电器件的光电转换功能将感光面上的光像转换为与之成相应比例关系的电信号。简单点说,就是将光信号转换成电信号的物质。
ISP 图像信号处理器:通过硬件将图像传感器输入的RAW 格式图像视频源转换为 YCbCr 等格式。在通过软件算法完成图像缩放、自动曝光、自动白平衡、自动聚焦等多种工作。
串行器:将处理后的图像数据进行传输,可用于传输RGB、YUV等多种图像数据种类。
连接器:用于连接固定摄像头。
摄像头性能参数有哪些?
摄像头的性能参数没有激光雷达那么复杂,主要包含:
分辨率:即像素,反映成像的清晰度;
探测距离:摄像头能够检测到的最大距离。这里有一个细节需要强调,同一颗摄像头对不同物体的探测距离可能不一样,比如大陆2018年发布的型号为MFC535的800 万像素摄像头,可以识别 100 m 的交通标志,140 m 的自行车、行人, 250 m 的轿车。
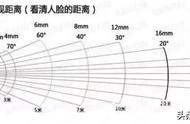
视场角:摄像头的探测角度,也就是FOV。这个和激光雷达一样。
一般情况下,探测距离和角度成反比。探测距离越远,角度就相对较小,而探测角度足够大,距离又比较小。这也是特斯拉经典的前视3摄像头的由来,为了同时满足角度和距离,特斯拉采用了长中短三种焦段的摄像头。三种摄像头的性能和分工如下:
前视摄像头:视场角一般为 30°、50°、60°、100°、120°,检测距离大概是 150 - 170 m。
广角摄像头:视场角在 120° - 150°左右,主要检测距离在 50 m 左右的物体,车辆周围的障碍物等。
窄角摄像头:视场角 30 - 40° 左右,探测距离250 m 甚至更远。主要是红绿灯、行人等目标的识别。
随着技术不断提升,测距和角度不可调和的矛盾正在被不断抹平。比如最新的800万像素,有效探测距离能达到200米,而FOV可以达到120°,原来3颗摄像头完成的工作,现在一颗全搞定了。
目前市面常见的摄像头种类有哪些?
常见的是130万像素,200万像素,500万像素,目前最高水平是800万像素。成本分别为人民币150元、200元、300元和500元。(业内平均估算,没有统一标准。)
对于摄像头的极限,有观点认为,摄像头模拟的是人眼结构,人眼的分辨率上限可达 5.7 亿多。那么摄像头还远没有达到探测上限。
这也引出了另一个问题的讨论:摄像头像素不断提升,激光雷达价格不断下探。二者是否会在某一个临界点交汇。届时,如果摄像头能够完成激光雷达所做的工作,那后者是否还有存在的必要?
理想创始人李想就这个问题有过讨论,他认为,摄像头800万以后会往2000万像素走,四五年以后,可能 2000 万像素的摄像头会跟激光雷达一个价格。
摄像头名称叫法有何不同?
摄像头叫法其实没有什么特别,一般就两种,按照位置和功能来区分。
比如按照安装位置,安装在车辆前中后的分别是前视/侧视/后视摄像头;按照功能,就是长焦/短焦摄像头,鱼眼摄像头(像鱼的眼睛一样)等。鱼眼摄像头一般都是大视场角,比如FOV 120°。
安装位置根据车型的设计,功能不同而不同。比如侧视摄像头,可以安装在车辆翼子板上,也可以安装在反光镜上方的灯带上,也可安装在反光镜下方与车门板连接处。
摄像头在智能汽车上主要用来干什么?
按功能划分,智能汽车车载摄像头一般分为3种,分别是:
智能辅助:分布在车辆的前中后各个部位。在行驶过程中,可以帮助车辆实现ACC自适应巡航、车道偏离预警、AEB(自动制动系统)等功能;在停止时,可实现“哨兵模式”,防止车辆被盗窃或者破坏。
人员监控:包括驾驶员监控系统DMS和乘员监控系统OMS。一般安装在车辆内部(A、B柱位置),中空板等。可实现驾驶员疲劳监测、面部识别,车内儿童遗忘监测、座舱异常情况监测等功能。
智能泊车:一般安装在车辆尾部,用于倒车、辅助泊车或自动泊车。
不过,目前摄像头又被开发出一项新功能:电子外后视镜。简单点说就是,汽车传统后视镜移到车内,外面通过一颗摄像头获取信息,在车内后视镜里显示。国外欧美日等国家已经通过了相关的法规限制,但国内目前的法规还没有批准电子外后视镜的存在。
有一个需要强调的小科普:有同学说,按照这个逻辑,那“透明底盘”是不是要在车辆底部安装一个摄像头。
其实不是,汽车行驶的环境非常复杂,底部根本安装不了摄像头,因为易破损。“透明底盘”的原理是在车辆前后方,安装镜头向下的摄像头,对车辆行驶过的地方进行扫描,然后对二者已经收集到的数据进行“拼接”,形成一个完整的汽车底盘图像。
注意,这里有一个关键点,“透明底盘”显示的图像并不是实时的,而是车辆前几秒走过的痕迹。举个例子,如果倒车进入一个非常干净的停车位,车辆停止之后,在其底部放一个轮胎,此时“透明底盘”不会显示这个轮胎,因为倒车入库之前摄像头看到的停车位是“干净”的。而车辆停止之后,摄像头无法看到车辆底部的实时情况,所以看不到车底下的轮胎。
一句话总结,“透明底盘”显示的是前几秒车辆走过的位置信息。有一个非常便于理解的比喻,中国的活字印刷术,先将文字木块排列在一起,涂上墨汁,然后用一块白布不断去覆盖文字木块,白布上就会出现相应的文字,如果在白布已经覆盖过的地方换掉其中的一段文字,白布上显示的依然是之前覆盖过的文字。
800万像素摄像头到底是什么概念?
这里需要引入另一个大家经常听到的概念,分辨率。它和像素一样都反映图像的清晰度,二者之间的对应关系如下:
像素=分辨率横轴数值x分辨率纵轴数值
分辨率的数值对应图如下:

分辨率一般包含两个同时出现的数值,比如00X00,但在口语中,大家习惯用横轴的数值表示分辨率,也就是大家常听到的720P、960P、1080P、4K(4000)等,即横坐标上有多少个像素点。
如果换算成对应的像素120万:1280X960=122.9万;200万:1920X1080=207;800万:3840X2160=829万。(像素一般取临近的整数便于表达)
这里的800万像素,对应的就是4K(实际上横轴只有3840个像素点)的数据,相当于4K高清电视的画质。
目前业内比较常见的车载摄像头就是130万像素,稍微好点的小鹏的200万像素,800万像素直接翻了4倍,带来的自然是更清晰的成像效果。
800万摄像头能带来更好的成像效果,更远的探测距离,以及更大的FOV视场角。
为了保证800万像素摄像头能够稳定发挥,与之配套的相应的软硬件也需要同步跟进。
800万摄像头对算力、算法的要求?
还有一个外界比较关心问题,800万摄像头升级,智能汽车对应的一系列问题是否也需要调整,比如算力,算法等。
1、像素加大到800万,算力需要多大?
一个非常直接的对应关系是,摄像头的像素加大,需要域处理器芯片的算力也相应的增大,但是二者之间的比例是多少没有定量,比如增大多少像素需要对应的增加多少算力,我们查阅了大量的资料并且也咨询了相关的专业人士,得到的结果是,二者之间的数据变化比例无法量化。
有业内人士做过一个估算,800万像素摄像头每秒钟需要的算力是1TOPS左右。对于大多数算力冗余的芯片来说,其实也完全够用了。
以蔚来ET7为例,其超算平台 NIO Adam 使用了 4 颗 NVIDIA Drive Orin 芯片,包括 2 颗主控芯片、1 颗冗余备份芯片、1 颗群体智能,以及1颗个性训练专用芯片,综合算力1016 TOPS。并且有超高带宽的图像接口,ISP 每秒可处理64亿像素。即便ET7拥有7颗 800 万摄像头,芯片算力也是完全足够的。

2、800万像素摄像头对算法提出了更高的要求?
800万像素意味着更多的数据信息需要处理。对芯片的算法提出了更高的要求。摄像头在100万像素级别时,用于车道检测,ACC等功能,用到的可能只是一些简单的模式识别算法。但是到了800万像素,随着摄像头的功能增多,数据量增大,需要用到芯片的神经网络对数据进行处理,在细分的卷积神经网络算法。技术难度在不断升级。
3、800万像素摄像头需要警惕发热和功耗问题?
需要强调的一点是,摄像头的像素越高,发热和功耗也就越明显。
为了解决这个问题,业内最常提到的就是安波福提出了ISP转移方案。图像处理器占了摄像头产生热量和功耗的主要部分。“拿掉”它就能很好的解决摄像头的散热和功耗问题。
简单点说,就是将ISP移到域控制芯片中,摄像头其他部分保留,只做信息采集使用,而数据的处理交给芯片完成。这样既解决了摄像头的发热和功耗问题,也降低了成本。
也有人认为,这其实是拆东墙补西墙,将大功耗、大算力的ISP从摄像头“剥离”出来,解决了摄像头的“燃眉之急”,但增加了视觉处理器SoC芯片的负荷,毕竟芯片也有热量和功耗的要求。
技术总在不断向前,我们知道的永远都只是片面。