3、实验要点:
实验前:调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做的目的是:
①排除杠杆自重对杠杆平衡的影响;
②便于从杠杆上直接读出力臂数值。
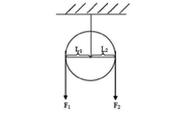
4、杠杆的平衡条件(或杠杆原理)是:
动力X动力臂=阻力X阻力臂。
写成公式:F1L1=F2L2
也可写成:F1/F2=L2/L1
【解题笔记】分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力的方向和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。)
【杠杆平衡时动力最小问题】此类问题中阻力×阻力臂为一定值,根据杠杆平衡条件F1L1=F2L2,要使作用在杠杆上的动力F1最小,其相应的动力臂L1应为最大值。
方法:
①定点:在杠杆上找离支点最远的点作为动力作用点;
②定向:连接动力作用点与支点,过动力作用点作垂线,根据动力和阻力使杠杆旋转的方向相反来确定动力的方向;
③定值:根据杠杆的平衡条件计算出动力的最小值。
三、杠杆的分类(三种杠杆)

【方法笔记】根据动力臂和阻力臂的大小关系,可以判断杠杆的类型,关键是确定支点,然后再找出动力作用点和阻力作用点的位置,进而大体上确定动力臂和阻力臂的大小:也可以根据使用目的进行判断,若是为了用较小的动力克服较大的阻力,则是省力杠杆;若是为了方便,省距离,则是费力杠杆。
《简单机械》
2.滑轮
一、定滑轮
1、定滑轮:工作时,轴不随物体移动的滑轮。
2、实质:等臂杠杆

3、特点:可以改变力的方向,但不省力。

4、相关公式:F=G(不计绳重和摩擦),S=h
二、动滑轮
1、动滑轮:工作时,轴随物体移动的滑轮。
2、实质:动力臂是阻力臂2倍的省力杠杆。