3.2 ADC转换
利用公式:

进行ADC转换。
3.3 驱动电机模块
电机运动分为搜索目标物以及跟踪目标物两个部分,程序如下:

跟踪目标物的过程中,将采集到的数据使用位置式PID算法:

式中:u(k) 为采样时刻k 时的输出值;e(k) 为采样时刻k时的偏差值; e(k - 1) 为采样时刻k - 1 时的偏差值;u0为t =0时刻对应的输出值。
采用位置式PID 算式,当达到设定的门限值之后再加入积分运算,这样就能够避免积分饱和问题。
4 实验
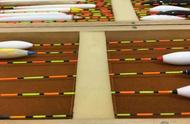
以波长为650 nm 激光作为目标物,首先目标物是静止的,此时跟踪伺服设备进行空间搜索的过程。待设备搜索到目标物之后,目标物开始移动,这时光斑中心与四象限中心不重合,单片机采集到数据后进行运算,输出PWM 波使电机开始转动,这样就能使设备跟着目标物运动。实验装置如图8所示。
5 结论
本设计采用性能优越的MSP430F169 作为控制核心。使用MSP430内部的AD模块以及定时器模块能够实现精准的多路数据采集。外围电路的设计,利用RC滤波器,减小噪声对信号的影响,同时利用相位补偿技术消除了自激干扰,使信号稳定输出。软件部分采用位置式PID算式,当达到设定的门限值之后再加入积分运算,这样就能够避免积分饱和问题,使跟踪设备平缓地到达指定位置。
来源:拍明芯城 www.iczoom.com