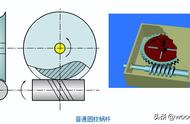
输入端:蓝色曲柄上固定有一个小蜗杆(1头,导程t1,节径D1)。
输出端:大蜗杆,2头,导程t2=2t1,节径D2=2D1。
输出以1转的速度移动t2。小蜗杆可以用圆柱形的圆形凹槽或齿条代替。
行星蜗杆传动研究1

输入端:蓝色曲柄。内齿轮(齿数Z2=76)静止不动。环形凹槽的橙色蜗杆固定在橙色齿轮上(齿数Z1=16)。橙色蜗轮蜗杆块在蓝色曲柄的偏心轴上空转。橙色蜗杆可以在粉红色大蜗杆上滚动,从而减少摩擦。
输出端:粉色蜗杆(导程=t2)在输入的1圈内线性移动t2的量。
行星蜗杆传动研究2

输入端:蓝色曲柄。内齿轮(齿数Z2=76)静止不动。黄色蜗杆(导程=t1,固定在黄色齿轮上(齿数Z1=16)。黄色蜗轮蜗杆在蓝色曲柄的偏心轴上空转。黄色蜗杆可以在粉红色大蜗杆上滚动,从而减少摩擦。
输出端:粉色蜗杆(导程t2=2t1),在输入的1转中线性移动一定的量S。
S=t2 (Z2/Z1)×t1
增加黄色蜗杆的数量可以获得高负载能力。
双蜗杆传动1

蜗杆螺纹的导程角为45度。传动比是1:1,是90度变向传动。
双蜗杆传动2