◇ L1:1575.42±1.023MHz
◇ L2:1227.60±1.023MHz
◇ L3:军事及科研应用,具体未公开
◇ L5:1176.45±1.023MHz(2009年测试,2010年正式播发)
目前个别客户会有双频GPS的需求,那双频GPS和单频GPS有什么区别,能带来什么好处呢?
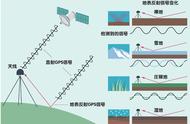
单频接收机
只能接收L1载波信号,测定载波相位观测值进行定位。因为不能有效消除电离层延迟影响,只适用于短基线(<15km)的精密定位。
双频接收机
可以同时接收L1,L2载波信号。利用双频对电离层延迟的差异性,可以消除电离层对电磁波信号的延迟影响,在几千公里的范围内,也可以实现精密定位。
应用场景
a) 民用GPS通常只使用L1波段;
b) 勘测与军事用途则需要同时使用L1和L2波段;
c) L5是第三种民用GPS信号,有利于GPS测量过程中的周跳探测、电离层延迟误差改正和整周模糊度的确定,可将民用定位精度从10米提升至3米。如博通的芯片上的接收器先用 L1 信号锁定卫星,然后用 L5 信号算出精确的位置。
四、为什么要加GPS LNA?GPS信号由卫星信号的发射接收路径如下:

注: -160dBW=-130dBm
如表格,开阔地带收到的GPS信号强度约为-130dBm,LNA的作用是放大天线接收到的微弱信号,同时降低系统后级噪声的影响。
五、典型电路原理图
GPS LNA及前端器件皆靠近天线馈点放置,且放于屏蔽盖中。
六、GPS系统指标GPS系统指标包括:灵敏度、TTFF(首次定位时间)、定位精度。
灵敏度定义:满足系统最小载波噪声功率谱密度比(C/N0)的系统输入信号功率Pr。

灵敏度
1、冷启动:接收机不依靠存储的上次定位信息,而是进行“满天搜索”。冷启动灵敏度典型值为-147dBm(CN0的典型值为25dBHz),冷启动时间一般大于30秒。
2、热启动:接收机利用存储的卫星星历和上次定位信号进行快速捕获卫星信号并完成定位。热启动要求接收机当前位置距离上次定位不能过远,而且星历应处于有效期内。热启动灵敏度典型值为-163dBm(CN0的典型值为9dBHz),热启动时间一般小于3秒。
3、暖启动:所谓暖启动,介于热启动和冷启动之间,有之前的参考频率等信息但星历丢失。暖启动时间一般大于10秒。
4、捕获:确定对接收机当前位置的可见卫星,进而计算可见卫星的频率和CA码相位信息。捕获分为冷启动和热启动两种模式。
5、跟踪:以提高捕获得到的CA码相位和载波频率的精度,并保持跟踪状态,进而去除载波和CA码以得到导航数据电文。跟踪灵敏度典型值为-165dBm(CN0的典型值为7dBHz)。
TTFF
是GPS系统最为重要的指标参数之一, 直接影响使用者的体验,定位时间越短,体验越好,一般冷启时间在25-60s内为正常。
定位精度
GPS卫星定位系统卫星轨道高度约为20200km,民用GPS L1频段定位精度可达10m。
七、GPS LNA芯片关键指标
芯片关键指标包括:噪声系数/增益/S参数/线性度(P1dB/IIP3/2rd harmonic)。
噪声系数(Noise Figure)
NF的定义:指在一定条件下,接收机或放大器,输入端的信噪比与输出端的信噪比,两者的对数比值,即F=(Si/Ni)/(So/No); NF=10*logF。
NF对系统的影响:接收机灵敏度 = -174dBm 10*log(BW) Eb/N0 NF,BW指的是中频带宽,Eb/N0与信噪比相关;对于确定的射频系统,BW及Eb/N0都是确定值,因此射频系统中影响接收机灵敏度的关键因素是噪声系数NF。噪声系数直接对应着插入损耗,越小越好。冷启动时,额外的0.1dB噪声系数会导致3~4秒的TTFF增加,甚至更长。
增益(Gain)
即输出功率与输入功率比值,也就是放大倍,噪声的公式如下: