现在我们从数学的角度,分析一下这种方法的原理。首先建立一个平面直角坐标系,用来模拟的Minecraft的世界位置,假设Steve出生在点A处,丢出一颗末影珍珠,记落地点为A’。再随机走到B点,重复操作,记作点B’。
根据两点确定一条直线的定律,可以通过4点确定2条直线。又因为在同一平面中,不平行的两条直线一定相交。据此就可以轻松地画出交点P,这就是要塞的位置。

[Pv.1-1] 利用交点确定要塞坐标
刚才讨论的是几何原理。如果给这些点代入具体的数据,用联立一次函数解方程的方法,就能够计算出要塞的坐标了。得到4个点坐标。代入解析式得到ya和yb。最后联立函数,计算出交点的坐标,要塞位于(40.8,40)。

[Pv.1-2] 联立一次函数解方程
但在实际测距的过程中,由于不可避免的角度偏差,并且要塞位置偏远,这使得误差大的足以让你找不到要塞在哪。此时,就可以用3次测距取平均值的方法大大缩短误差。如下图所示测距三次,由于误差原因交于3点a.b.c。因为不在同一条直线上,首尾相接的三条线段构成三角形,故将交点的封闭图形视作三角形。
为了求到最精确的点,应该先画出该三角形的水平宽和铅锤高。取宽和高的中垂线,交三角形内部于点Q。Q即为要塞坐标。(即三角形外接矩形的重心)
同样代入具体数据,用代数法求出精确坐标。水平宽的中点为(0.5*(50 65),35),铅锤高的中点为(65,0.5*(35 60))。化简得(57.5,35) (65,47.5),最终点Q为(57.5,47.5)。

[Pv.1-3] 误差的确定算法
但三次测距本身需要解6次二元一次方程组,再确定宽高平均值,并且数据都保留了3位小数,计算量非常大,很容易算错。这里up主采用了C语言编程的方法,实现了计算的自动化。下面是程序的完整代码。
#include <stdio.h> //I/O标准输入输出流
#include <math.h> //开平方&根号操作
int main(void){
/***********************数据定义区域***********************/
int i,j; //循环(无实意)
double p; //用于稍后的排序
double x[6],y[6]; //指测量坐标 共测量6个点
double k[3],b[3]; //指函数参数 共有3个一次函数
double Rx[3],Ry[3]; //指交点坐标 3个函数共有3个交点
double RL,RH; //指构成三角形的水平宽 铅锤高坐标(结果)
/***********************用户交互区域***********************/
printf("Minecraft 求解地牢坐标工具v1.2 (制作:b站小泠君丶)\n\n");
printf("<现在,请输入你的测量数据>\n\n");
j=-1;
for(i=1;i<4;i ){ //循环3次获取坐标位置
j ;
printf("输入第%d次的原地x坐标:",i);
scanf("%lf",&x[j]);
printf("输入第%d次的原地y坐标:",i);
scanf("%lf",&y[j]);
j ;
printf("输入第%d次的末影之眼x坐标:",i);
scanf("%lf",&x[j]);
printf("输入第%d次的末影之眼y坐标:",i);
scanf("%lf",&y[j]);
printf("\n");
}
/**********************求并解函数解析式********************/
j=0;
for(i=0;i<3;i ){
k[i]=(y[j 1]-y[j])/(x[j 1]-x[j]); //求解系数k
b[i]=y[j]-(x[j]*k[i]); //求解常数项b
j =2;
}
for(i=0;i<2;i ){
Rx[i]=(b[i]-b[i 1])/(k[i 1]-k[i]); //求解交点(1-2/2-3)
Ry[i]=Rx[i]*k[i] b[i]; //y=kx b
}
Rx[2]=(b[2]-b[0])/(k[0]-k[2]); //求解交点(1-3)
Ry[2]=Rx[2]*k[2] b[2];
/***********************误差确认区域***********************/
//排序算法 排列三个交点Rx与Ry p作为交换变量
if(Rx[0]<Rx[1]){
p=Rx[0]; Rx[0]=Rx[1]; Rx[1]=p;
}if(Rx[0]<Rx[2]){
p=Rx[0]; Rx[0]=Rx[2]; Rx[2]=p;
}if(Rx[1]<Rx[2]){
p=Rx[1]; Rx[1]=Rx[2]; Rx[2]=p;
}if(Ry[0]<Ry[1]){
p=Ry[0]; Ry[0]=Ry[1]; Ry[1]=p;
}if(Ry[0]<Ry[2]){
p=Ry[0]; Ry[0]=Ry[2]; Ry[2]=p;
}if(Ry[1]<Ry[2]){
p=Ry[1]; Ry[1]=Ry[2]; Ry[2]=p;
}
/*此时大小排列:Rx[0]>Rx[1]>Rx[2] 即L=Rx[0]-Rx[2];*/
RL=0.5*(Rx[0] Rx[2]); RH=0.5*(Ry[0] Ry[2]);
/***********************用户交互区域***********************/
printf("成功计算!地牢坐标位于(%lf,%lf)处!\n\n",RL,RH);
printf("----------------调试信息-----------------\n");
printf("确认输入:第一次 (%.2lf,%.2lf) (%.2lf,%.2lf)\n",x[0],y[0],x[1],y[1]);
printf("确认输入:第二次 (%.2lf,%.2lf) (%.2lf,%.2lf)\n",x[2],y[2],x[3],y[3]);
printf("确认输入:第三次 (%.2lf,%.2lf) (%.2lf,%.2lf)\n",x[4],y[4],x[5],y[5]);
printf("确认解析:y=%.2lfx% .2lf y=%.2lfx% .2lf y=%.2lfx% .2lf\n",k[0],b[0],k[1],b[1],k[2],b[2]);
printf("确认交点:(%.2lf,%.2lf) (%.2lf,%.2lf) (%.2lf,%.2lf)\n",Rx[0],Ry[0],Rx[1],Ry[1],Rx[2],Ry[2]);
printf("\n按<任意键>退出本程序.");
getch();
return 0;
}
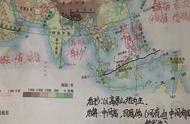
应用上面讲过的测距和提高精度,就可以很精确的计算要塞位置。但要真正了解末影定位的原理,就需要先了解要塞的生成算法。首先,主世界中会生成128个地牢。分布规律是这样的,以出生点作为中心O,依次向外做出8个圆心为出生点的圆环。每个圆环的宽度为1280米,相邻两个环间间隔3072m。圆心O距第一环为1408米。每个环上都会随机生成不等数量的地牢。随机模拟分布情况,类似于下图所示,标定的黄点就是要塞。这么多要塞会导致什么问题呢?答案是会导致测定时没有指向同一位置。

[Pv.1-4] 要塞的生成算法
例如测定白色点的要塞,在原点进行第一次测定,向前第二次测定,若走动过远,第三次会导致目标指向其它位置。这样就会导致计算结果完全错误,按照上述方法,得出了错误的点。
因此,在测量时走动不宜过远,±50m最佳。

[Pv.1-5] 生存技术检测题
本期生存技术检测题Ep.1
该题的正确答案是? 单选 0人 0% A. (-1,-1) 0人 0% B. (16,16) 0人 0% C. (3.25,-9.5) 0人 0% D. (7.5,3.25)
,