关注:灰质,有趣有料的AI技术分享

前言
带着AI内核的机器人是未来科技发展的集大成者,可以说是下一个技术奇点的标志性产物。“机器人革命”有望成为“第三次工业革命”的一个切入点和重要增长点,国际机器人联合会预测,“机器人革命”将创造数万亿美元的市场。很多人都认为,机器人是“制造业皇冠顶端的明珠”,其研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志。
机器人已经走入人类生活的很多方面了,我们就来聊一聊机器人的过去、现状和未来。
机器人的起源
英文里Robot这个词起源于捷克作家卡雷尔恰佩克的戏剧《罗萨姆万能机器人公司》(1921年),这是一个来源于古斯拉夫语的词语,本来是有强制劳动的意思,剧中的机器人主要去干脏活、累活和危险的活,倒是与现在机器人的情况也比较相似。
目前对机器人的统一定义还没有给出来,联合国标准化组织采用了美国机器人协会给机器人下的定义,“一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可改变和可编程动作的专门系统”。我国的一种定义是,“机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器”。《中国大百科全书》中对机器人的定义是,能灵活地完成特定操作和运动任务,并可再编程序的多功能操作器。
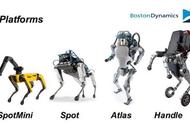
按照这些说法,扫地机器人、工厂机械臂、物流机器人、无人车、无人机和无人船等都属于机器人的范畴。近年来,机器人领域有很多令人惊艳的产品,如波士顿动力的人型机器人Atlas和机器狗Spot、德国Festo公司的仿鸟和水母机器人等,虽然在外形上千差万别,但都被统称为机器人。
当下机器人是一个多学科交叉融合的技术,涉及机械、计算机、自动化和人工智能等。但本质上还是由感知、决策和控制这三部分组成。以无人车为例,无人车的控制主要就是速度、方向;感知则是靠相机、激光雷达和毫米波雷达等传感器;决策的经典方法是规则化的,但是现实情况往往难以遍历所有可能的规则,这时候人工智能技术就用来解决学习人工难以完全准确描述的现实规则,比如强化学习方法。
说到机器人当然会提到阿莫西夫的机器人三大定律:
第一:机器人不得伤害人,或者任人受到伤害而无所作为。
第二:机器人应服从人的一切命令,但命令与第一法则相抵触时例外。
第三:机器人必须保护自己的存在,但不得与第一、第二法则相抵触。
这三大定律一直被奉为圭臬,对于人类自然是百利而无一害,不过不得不说即使按照宠物来看待,这个法则也过于严苛了。我们人类当然是希望这三大法则一定要执行贯彻执行下去才行。
历史上的机器人
机器人在古代很早就已经出现了,那时候主要是结构上的模仿,能够自动做一些事情,很多奇思妙想,引人赞叹。咱们就来看一看都有哪些好玩的。
指南车,传说中的存在,远古时期蚩尤和皇帝交战时,指南车可以在茫茫不辨方向时指示方向,帮助黄帝打败了蚩尤。不过三国时期还真有人做出了一款指南车,这个人叫马钧,在史书中有记载。
木鸟,这个广为流传,据说是鲁班用木头可以做出会飞的鸟,能飞三天三夜,而且史*载墨子、张衡、韩志好些人都会做木鸟,看来有点可信度,不知道是不是类似叠飞机那种,但是长期飞行感觉还是挺难的。现在德国的Festo公司用复合材料也制作出了和鸟非常像的仿生机器人。这种时间差让人感觉很神奇。
记里鼓车,古代自带里程提醒功能的车,车上的木人一里一敲鼓,十里一敲镯,史料记载也有很多人做出来了,这个貌似也不太难。
木牛流马,这个比较传奇,记录在三国演义中,诸葛亮发明了一种可以搬运粮草的木制牛马,不用吃东西也不用喝水就能运送东西,而且嘴里还有机关可以控制停还是走,这个就没有人复现出来了。从能源的角度这个东西是很值得怀疑的,毕竟那时候还没什么靠谱的能源,不可能做个永动机出来不是。
气转球,这个是古希腊数学家希罗做的,用蒸汽驱动一个球体转动,还可以发出声音,模仿人的声音或鸟叫声等,很有趣的玩具。
射箭童子,日本人做的,参考钟表齿轮和发条的原理,让一个人偶可以自动取出箭矢并拉弓射箭,据说还给康熙表演过。
机器鸭,法国做的仿生鸭子,会叫会游泳,关键是还会喝水进食和排泄,这个比较惊艳,据说是想要通过把生物功能机械化来进行医学分析。
写字玩偶,瑞士工程师利用齿轮和发条原理做的,可以用鹅毛蘸墨水写字,一款精巧的玩具,原理上和前面的射箭童子比较像。
一直到有了发动机、电机之后,对类似于人类或动物身体结构的机器人模拟丰富多彩,越来越逼近,但是所能做的事情都还非常简单,因为大都缺个“脑子”,即信息处理能力非常弱。直到近代半导体设备的出现,尤其是计算机的出现,使得机器人从“心灵”上都越来越像人了。
近代以来的机器人
1959年,机器人之父英格伯格创造了机械臂尤尼梅特(Unimate),这种机械臂极其经典,相似形式的机械臂至今仍然被广泛应用在工厂流水线,就是我们经常看到的那种一只手臂。这个家族到现在做的比较好的有KUKA等企业。
机械臂这个方向发展出了一系列的非常实用的机器人,给机械臂装上设备就能干很多事情。比如焊接机器人,在机械臂上配备焊接设备就可以干活了,这样人就不用暴露在焊接的危险环境下了,而且机械臂工作的持久性和效率都很高。装配机器人,还是机械臂配备摄像头等传感器识别定位,抓取设备来拿零件和装配,很多汽车的装配车间都有。喷涂机器人,把喷枪装到机械臂上,可以实现高效的喷涂,避免了喷涂材料对人体的伤害。固定式的搬运机器人又叫码垛机器人,可以在固定区域完成重物的搬运摆放。
后来发展了更多种类的机器人,轮式的、双足的、四足的、履带的、固定翼的、多旋翼的、水面的、水下的等等,用途也非常广泛,工厂、物流、果园、家庭、医院等等,发挥的作用也越来越大。
双足人形机器人,这类机器人实现稳定行走是关键技术,不过已经有公司连后空翻、跑酷都能做到了,甩了其他同行一个街区。最为大名鼎鼎的算是波士顿动力的Altas了,已经可以跑酷、跳集体舞了。索菲亚,英国做的一款仿人类的女性机器人,号称具有自我意识。我国优必选公司的Alpha系列机器人玩具。日本和法国共同研发的Pepper机器人。1939年纽约博览会展出的机器人Elektro,除了能识别语音命令之外,还会吸烟、吹气球,甚至能移动它的头和手臂。
四足机器人,大狗,波士顿动力公司早期的产品,属于四足机器人,可以在山地行走,运送物资等,算是现代版的木牛流马了。
轮式机器人,早期代表性的有美国斯坦福的Shakey,法国图卢茨的Hilare等。80年代Darpa支持了自主地面车辆的研究,发展很快。其他还有轮式救生机器人uBOT-5,1989年美国做出来的一个可以为病人提供听诊等服务的医疗机器人,屏幕上远程连接医生,具有一定的识别判断能力。轮式采摘机器人,可以利用机械手或特定的农业工具,实现果实采摘、播种、插秧、打药等。轮式医疗机器人,可以配备医疗检查的传感器或仪器设备,实现对人类的辅助护理或医疗康复。轮式送餐机器人,在很多宾馆和餐厅可以看到了,把做好的饭菜放到机器人上,可以自动送到指定位置。
履带式机器人,机器战车,MRK-27-BT,俄罗斯做的一款履带式战斗机器人,配备武器用于实际战斗,人类通过远距离遥控。排爆机器人,也是一种无人车,通过摄像头观察爆炸物,用机械手抓取或拆除爆炸物,还可以用水枪或武器引爆爆炸物。
无人机,这个非常多了,最先进的还是在军事领域,飞得又高又远又快,看的也远,能*活也多,民用的无人机大多用来拍摄,运输用的无人机还不多,正在发展,以后无人机送快递的可能会越来越多。
仿生物机器人,仿生鱼,像鱼一样的外形和游动方式,看起来很有意思,不过实际的用途可能还不是太多。蛇形机器人、水母机器人、仿鸟机器人等等。
水下机器人,可以自动完成水下的探测考察任务,很多水下的科学考察都在用,带上水下的摄像头、光照设备、机械手等,可以做很多事情,而且可以去很深的地方,替人类去冒险。
除此以外还有太空探测的机器人、无人车、无人船、家庭机器人、物流搬运机器人等等。
总体来看,不同形式的机器人各有优点,比如履带式机器人因为履带上的压力分布整体均匀,在松软地面上性能优秀,很适合野外等特殊地形使用。足式机器人在台阶、崎岖地形中比较好用,不过因为结构自由度多,控制起来比较困难,能够做到波士顿动力那样就是非常厉害了。蛇形和跳跃式的机器人在一些极端特殊的环境中有独特优势,不过承载能力有限,运动控制也比较困难。轮式机器人承载能力较大,控制相对成熟容易,应用也更为广泛。
做好机器人的核心技术
总体设计:没有一款机器人是万能的,就像没有免费午餐定理(No Free Lunch,NFL)说的一样,脱离具体的功能目标去谈总体的优化设计是没有意义的。好的机器人必须在各个部分的设计与组合上寻求对目标的优化,否则会陷入什么都会,什么都不行的尴尬境地,毕竟每一种选择都是有局限性的,所以总体设计是一个考量权衡的系统工程。
做好一款机器人必须先要明确目的,定义功能和约束,才能够在可行的技术中去选择和组合,形成总体的方案。
躯干-结构与执行器:不同的场景需要不同的结构来适应,平坦道路用轮式机器人,不太平坦的道路用履带式机器人,特别崎岖的地形用足式机器人,天空有飞行器、海上有船舶、水下有潜航器,一个固定的位置则可以考虑用机械臂作为主体结构。具体结构的设计又涉及到重量、尺寸、稳定性、阻力等各种参数的计算与权衡,也是一个多学科优化的过程。
执行器与要实现的功能有关,比如抓取、喷涂、焊接、吸附、运输、医学检测等等,要选用相应的执行器来完成,安装执行器要与结构匹配,驱动执行器要与能源动力匹配。
内脏-能源与动力:能源好理解,化学能、电能、生物能、太阳能等,日常见到的煤炭、石油、电池、水力、风力等等。能源是一切东西能够动起来的根源,没有能源就没有运动,不过能源的本质是什么确实是个很好玩的事情,非常多的问题值得研究。
动力就是发动机了,利用电能驱动的电动机,石油类燃料驱动的柴油机、燃气轮机等,以及各种新能源转化成电能再驱动电动机。
神经-导航、感知和传输:感知能力目前的机器人与人相比,在触觉和温度的感觉方面还有差距,但是在红外、电磁等感知能力上,以及精确的测量方面,机器人具有独特的优势,因为可以安装各种不同的传感器。当然,人类借助这些传感器也能够获得新的感知能力。
传输方面,外部信息传输主要依靠通信设备,包括有线传输和无线传输形式的,内部信息传输则主要依靠电路系统,类似于人的神经系统。
大脑-计算:融合、规划和控制:看了这么多机器人,大家恐怕会发现,如果只是以上的这些方面,机器人和机器就很接近了,都是重复作业的设备,那么,机器和机器人又有什么区别呢?恐怕主要的区别就在这个信息处理能上了,机器更加强调的是执行能力,机器人会把人类对信息的处理能力模仿放在更加重要的位置。
如果把机器人自古至今的发展看成是一个物种进化过程的话,这个物种的结构、内部构造以及基本的神经系统都已经有很好的基础了,目前正在重点成长的是大脑部分,也就是对现实世界中复杂信息的处理能力的提升。
提到信息处理能力就必须讲一讲计算机了,因为计算机的发明完全就是为了模拟人的信息处理能力的,从一开始的火炮弹道信息计算到艾尼阿克,再到当今人手一台的计算机,以及超级计算机、量子计算机、类脑计算机等等,机器人的大脑可以说是日新月异。
关于图灵和计算的历史咱们在以前的文章《图灵》和《计算》中聊到过,基本上,大家比较公认的是,图灵是计算机科学之父,理论方面的开创者。而冯·诺依曼是现代计算机之父,创造出了真正意义上的现代计算机。冯·诺依曼是个大神,算是科学巨匠了,数学、现代计算机与博弈论的重要创始人,做了非常多开创性的工作。
说道冯·诺依曼这个大神,大佬出生在银行家家庭,上大学的时候非常奇葩,同时注册了三所大学,而且攻读了化学工程的本科和数学博士学位两个不同的方向,并顺利毕业,这倒是属于天才们的常规操作。冯·诺依曼尤其以心算能力著称,被美国各个科学团体奉为上宾,很多数学上的难题都会请他来解决,而且效率很高。大神是在53岁那年因病去世的,在遗留之际居然让美国国防部正副部长、三军司令和其他所有军界要员全部到场送行,不为其他,而是这位大神作为博弈论之父,分析能力当世顶尖,所以他的意见受到非常高的重视。
计算机出现之后,处理信息的算法研究就走上了高速公路,我们在《算法》和《仿真》之中提到过计算机带来的变化,这里不再多说。近年来代表性的成果就是Deepmind、Google和OpenAI创造的AlphaGo、AlphaZero、AlphaFold、AlphaStar、Transformer、PPO等一系列的强大算法,下得了围棋、分析的了蛋白质、打得了星际争霸、搞得定翻译,在一个个领域不断地通过图灵测试,可以说是飞速发展了。
利用这些传感器和通信设备接收的信息形成认识、判断和决策,并发出控制指令的部分都是依靠计算来完成的。像前面所说的,在很多单项任务上,计算机都在不断逼近或超越人类,但是综合来讲,距离全面超越人类还是有很大差距的,这方面在《神经网络》和《算法》中都提到过。尤其是计算机何时会产生主体的意识并自主进化这件事会成为机器人这个物种发展的一个技术奇点,或许在某个科学家的实验室里就会发生,既让人期待又让人担忧。
这些计算背后的基础都可以归结为数学问题。当然核心的瓶颈就是实现机器人自我驱动的去提升自己的信息处理能力,模拟人类的学习和信息处理能力,有了这个再加上计算机可以不断扩展的硬件,机器智能超过人类就是分分钟的事情了。
发展到现在,机器和机器人其实可以看做是一码事,或者说机器是机器人的基础,只不过在过去的时期里主要发展的机器人的身体躯干,以及基本的神经系统。但是这些年以来发展的中心逐渐侧重于“大脑”了,即机器人对信息的处理能力,毋庸置疑,这样发展下去机器人不仅已经在生理上超越人类,智力上也将超越人类。所以人类如何与这样的智能机器人相处,将是非常重要的课题。
荧幕上的科幻机器人
相比于现实中的快速发展,科幻题材的文字和影视作品更是突飞猛进,百花齐放了。科幻往往是科技发展的预言家,人类对机器人的幻想大都放在了动画、电影和电视剧之中,比如现在小孩子经常看的超级飞侠、小时候的变形金刚等等。而且很多当年的幻想都在逐渐的变成现实,不由得让人浮想联翩。自从80年代就已经出现并越来越高的频率出现在荧幕上,尤其美国、日本比较多这些东西,可能其他国家也很多,欢迎大家留言推荐。说几个比较经典的。
《星球大战》(1977年)中树立了一个个机器人形象更是深入人心,朋友兼保姆的双足机器人C3-PO,轮式机器人助手R2D2。
《异形》(1979年)中的反派角色ASH,他绝对服从被输入的指令,甚至可以不顾人类性命,引人深思。
《银河系漫游指南》(1981年)中的可爱双足机器人,忧郁症患者Marvin。
《变形金刚》(1984年)中的汽车人擎天柱和大黄蜂,一个是霸气的领袖,一个是幽默的队员。
《人工智能》(2001年)中的机器人小孩大卫,天真与执着打动观众。
《机器人总动员》(2008年)中的瓦力与伊娃,演绎了机器人的爱情,形象非常可爱。
还有大白、铁臂阿童木、机器猫、高达、终结者、攻壳特工队的人形使、银翼*手中的警察戴克、超能查派、机器人女友、机械公敌、复仇者联盟等等,非常多非常多。
这些机器人形象无不是人们对其未来机器人的期待、担忧以及各种各样的幻想,可以看出来人类对待具有等同甚至超过人类智能的机器人的情绪是非常复杂的,有点像父母与孩子的关系一般,可能还要更多因素的交融,尤其是伦理方面的,非常难说清楚。
意识和控制,机器人的伦理
直至今日,大部分人觉得自我意识、对艺术和人际关系的理解和创造等都是机器人无法企及人类的方面,不过随着这些方面技术的不断突破,恐怕未必能够保持多久的优势。这里有一个技术奇点的理论,就是延续性的科技发展累积到一定阶段会取得对重要问题的突破,那将会带来相关很多技术的升级换代,例如蒸汽机、计算机、原子弹、互联网那样,不过在当时那个时代的人来看,这个过程也比较缓慢,需要个几年十几年的过程。
关于人类之于机器人情感,可以聊一聊“恐怖谷理论”,是日本机器人先驱森政弘提出的。就是当机器人还很low的时候,人类是觉得好奇的,当机器人已经表现出一些很强的能力,但是整体还有较大差距的时候,人类会觉得害怕,但是随着机器人几乎与人相同的时候,人类又会接纳机器人,实际过程也跟这个说法很相似。由于“恐怖谷理论”基于心理学提出,所以它为后世的各种文艺作品提供了良好的思想灵感,主要体现在文学作品、电影、电子游戏与动漫作品中。
从荧幕上的机器人可以看出这一点,一开始的好奇和期待的正面角色,到后来各种反派的引人深思,到现在的善恶都有,整体越来越与人类和谐相处的发展过程。真实世界大概也是如此吧。
未来展望
最后说说未来吧,尤瓦尔·赫拉利在《未来简史》中预言:人类将迎来第二次认知革命,算法将战胜自由意志,大部分人将沦为无用阶层!《失控》的作者KK则说,未来的趋势之一就是人工智能时代将会降临,AI可以专心做好一件事情而不会像人类那样分神。
通过机器人的分析不难看出,传感采集、信息处理、动作执行和信息传输等相关软硬件技术的快速发展将会为我们带来越来越多种类和能力的机器人,机器人将以软件、实物,甚至是液体的形式存在,万物感知、互联、互相影响,各种形式的机器人将逐渐接管绝大多数人类能够从事的生产及活动。
终极情况下,随着这个时代最大的难题之一:大脑信息处理规律的解密,人与机器的界限将非常模糊,人甚至会被当做机器人对待,好像银翼*手和攻壳特工队。DeepMind的口号也是搞定AI,用AI搞定一切。
这算不算是人类创造了新的亚当夏娃,实现了种族的延续呢?从而使得这个种族在信息,物质和能源上实现质的跨越,去探索更大的宇宙世界,创造更多奇迹。
推荐几部经典的电影、电视剧和动漫,银翼*手,攻壳机动队,西部世界,高达等等,可以看到人类一直没有停止对未来的想象,想象力一直也是促进人类前进的重要因素。
题外话,一路聊来陆续看到了几个科学巨匠了,图灵、马尔可夫、冯·诺依曼,发现了一个共性的地方,那就是数学都学得非常好,基本上都能在很本质的问题上实现突破,而且还可以跨领域突破,不得不说,学好数理化,走遍天下都不怕还真的是真理,尤其是数学,以后可以专门聊聊不枯燥的数学,学习一下如何用数学的眼光看世界。
一点关于机器人的粗浅认识,班门弄斧,如果觉得还行,请给咱们支持一下吧,点赞、分享、收藏各种走起,在此多谢啦!