红外感应自动移门无需人工干预,全自动运行,运转时平稳、安静。其高可靠性使得它适用于许多场合,是方便和舒适的理想产品。
红外感应自动移门由以下7部分构成。
(1)主控制器:它是自动感应门的指挥中心,通过内部编有指令程序的单片机,发出相应指令,指挥电机或电锁类系统工作。人们还可以调整自动感应门门扇的开启速度、开启幅度等参数。
(2)感应探测器:可以采用红外、激光或超声波等探测器。目前主要采用红外探测器,负责采集外部信号,如同人们的眼睛。当有移动物体进入它的工作范围时,它就给主控制器一个启动信号。
(3)动力电机:提供开门与关门的主动力,控制自动感应门门扇加速或减速运行。
(4)门扇吊具走轮系统:用于吊挂活动门扇,同时,在动力牵引下带动门扇运行。
(5)门扇行进轨道:就像火车的铁轨,约束门扇的吊具走轮系统,使门扇按特定方向行进。
(6)同步皮带(或三角皮带):这是用于传输电机所产生的动力,牵引门扇吊具走轮系统。目前大部分产品使用同步皮带。
(7)下部导向系统:这是门扇下部的导向与定位装置,防止门扇在运行时前后摆动。
工作过程上电后,红外感应自动移门先进行初始化工作:以学习速度缓慢开门,撞墙后停下,并清除长度计数器。然后,以学习速度缓慢关门,门关拢后停下,将测得的正确行程(开门或关门长度)存入单片机的EEPROM,从而进入待机状态。
在待机状态下,如果红外感应探测器探测到有人进入,便输出一个启动信号给主控制器。主控器得到此信号后,控制电机运行,同时监控电机转数(开门长度),以便控制电机在什么时候加速、什么时候匀速、什么时候减速运行。电机得到一定运行电流后,正向运行,将动力传给同步带,再由同步带将动力传给吊具系统,使门扇开启,完成一次开门过程。
自动感应门扇开启后,由控制器作出判断,如较长时间没有探测到人员进出,则通知电机反向运动,关闭门扇。
一次开门与关门过程中,电机的转速变化分析如图1.1所示。
在待机状态时,操作员可以输入红外感应自动移门的相关工作参数,见表1.1。

表1.1 红外感应自动移门的相关工作参数

图1.1 一次开门或关门过程中,电机的转速变化
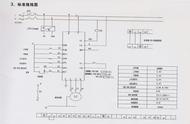
系统方案设计红外感应自动移门的主控制器由单片机控制器、数码管显示器、直流电机推动-驱动电路、速度信号反馈电路、继电器控制电路、按键输入电路、用户状态设置电路、红外线感应探测器及电源等组成,如图1.2所示。

图1.2 红外感应自动移门主控制器的构成