运动控制编程:动动您的小手,先关注再观看,留下您的观点,一起探讨交流。
电子凸轮是一种新型的精密控制技术,其基本原理是利用电子装置控制电机旋转,并由旋转的电机带动控制系统运动,实现对凸轮轮廓的控制。与传统机械凸轮相比,电子凸轮具有更高的精度和可靠性,能够满足更多的应用需求。

电子凸轮示意图
电子凸轮底层运行,本质上是几个轴之间的联动插补形成的轮廓轨迹,在不同的应用应用场景,只是参数工艺不同。BH-M100 中文编程运动控制器,为了降低使用门槛,专门开发了一个自动凸轮指令,让更多的用户能够简单的上手使用。

电子凸轮程序运行界面
自动凸轮指令介绍:

电子凸轮编程填入数值
指令格式说明:
自动凸轮 跟随距离(100)参考距离(100)启动比例(0)结束比例(1)跟随轴(轴1)参考轴(轴2) [连接模式(位置触发)][触发信号(输入1)] [连接位置(100)]
参数含义:
1.跟随距离:从连接开始到结束,跟随轴移动的距离,此参数可正可负,为正数时正方向跟随,为负数时负方向跟随;
2.参考距离:参考轴在连接的整个过程中移动的绝对位置增量,不管参考轴运动正负方向,都为正值;
3.启动比例:启动时跟随轴和参考轴的速度比例,负数表示跟随轴负向运动;
4.结束比例:结束时跟随轴和参考轴的速度比例, 负数表示跟随轴负向运动;
5.跟随轴:跟随轴轴名称(往复运动轴);
6.参考通道:参考轴所在通道
7.参考轴:参考轴轴名称(一直匀速运动的轴);
8.[连接模式]:立即触发,自动凸轮执行后立刻跟随;信号触发:信号上升沿触发跟随; 位置触发:参考轴到达指定位置后开始触发跟随;
[触发信号]:可缺省,选择触发输入信号,只能使用R信号;
9.[连接位置]:可缺省,模式为位置触发时不能缺省,当参考轴在该绝对位置时,连接开始;位置触发指的是参考轴的绝对位置坐标;
注:连续多条凸轮指令时,除首行指令外,其他行指令需使用立刻触发的方式,否则不会连续;
注:轴0~轴31缓冲的凸轮指令条数,存放在变量1400~变量1431中;
注:如果结束时速度比例不为0,又没有缓冲新的凸轮指令,该轴会从最高速降速到0,报警“轴超速”;
电子凸轮中文程序示例:
绝对运动 轴1 0.000 轴2 0
轴3 0.000 速度 300000
延时时间 时间 2000
//主动轴开始单控运行
单控速度 轴名 轴1 速度 15000
延时时间 时间 1000
//从轴跟随主轴运行,速度从0到主轴速度100%,跟随距离必须大于参考距离的1/2,否则无法达到主轴速度的100%
自动凸轮 跟随距离 500 参考距离 1000 启动比例 0 结束比例 1 跟随轴名 轴2 参考通道 通道1 参考轴名 轴1 连接模式 位置触发 触发位置 1500
//从轴跟随主轴运行,速度从100%到主轴速度200%,连续两段之间,上一段的结束比例和下一段的启动比例需要一致
自动凸轮 跟随距离 1500 参考距离 1000 启动比例 1 结束比例 2 跟随轴名 轴2 参考通道 通道1 参考轴名 轴1 连接模式 立即触发 触发位置 500
自动凸轮 跟随距离 3000 参考距离 1500 启动比例 2 结束比例 2 跟随轴名 轴2 参考通道 通道1 参考轴名 轴1 连接模式 立即触发 触发位置 500
自动凸轮 跟随距离 1500 参考距离 1000 启动比例 2 结束比例 1 跟随轴名 轴2 参考通道 通道1 参考轴名 轴1 连接模式 立即触发 触发位置 500
//自动凸轮跟随全部结束后,才会执行缓冲输出信号。该信号执行后没有回收复位操作,可以在PLC中进行延时复位
缓冲输出 轴名 轴2 信号 主轴正转 输出 ON 时间 1000
延时时间 时间 10000
//跟随循环开始
跳转标志 编号 1
自动凸轮 跟随距离 1000 参考距离 1000 启动比例 1 结束比例 1 跟随轴名 轴2 参考通道 通道1 参考轴名 轴1 连接模式 立即触发 触发位置 500
自动凸轮 跟随距离 1500 参考距离 1000 启动比例 1 结束比例 2 跟随轴名 轴2 参考通道 通道1 参考轴名 轴1 连接模式 立即触发 触发位置 500
自动凸轮 跟随距离 1500 参考距离 1000 启动比例 2 结束比例 1 跟随轴名 轴2 参考通道 通道1 参考轴名 轴1 连接模式 立即触发 触发位置 500
自动凸轮 跟随距离 750 参考距离 1000 启动比例 1 结束比例 0.5 跟随轴名 轴2 参考通道 通道1 参考轴名 轴1 连接模式 立即触发 触发位置 500
自动凸轮 跟随距离 750 参考距离 1000 启动比例 0.5 结束比例 1 跟随轴名 轴2 参考通道 通道1 参考轴名 轴1 连接模式 立即触发 触发位置 500
自动凸轮 跟随距离 1000 参考距离 1000 启动比例 1 结束比例 1 跟随轴名 轴2 参考通道 通道1 参考轴名 轴1 连接模式 立即触发 触发位置 500
跳转标志 编号 2
延时时间 时间 500
//判断轴2的凸轮缓冲区是否大于2,大于2则跳转回去继续等待;不大于2则缓冲下一个凸轮循环
条件判断 变量 变量1401 条件 大于 数值 2
绝对跳转 编号 2
结束判断
绝对跳转 编号 1
程序结束

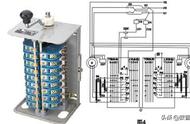
电气控制拓扑图

运动控制器参数列表
欢迎留言探讨您现在遇到的电子凸轮应用案例。
,