工业机器人的编程与其它的传统编程是有一定区别的,不仅要学习编程语言,熟悉指令、程序结构等知识,还需要进行点位的示教,也就是说编程者还要亲自操作机器人到达某一个点,并修改位置,使机器人记录下来,最后机器人才能够根据你的程序和点位数据进行自动运行。所以熟练的操作机器人进行点位的示教非常重要,一定要熟练。大部分人只侧重编程语言的学习,忽视了手动操作的重要性,一定要避免这个误区。
下面通过小任务讲解手动操作:
任务:将ABB机器人6个轴都调到0度,并沿着X轴正向走适当距离,Y轴负向走适当距离,Z轴正向走适当距离,再使ABB机器人除5轴外都调到0度,5轴90度。
一、任务分析及解答:这个小任务需要对机器人的机械零点位熟悉,需要对1-3和4-6轴切换熟练,对摇杆操纵各轴运动和线性运动方向熟练。先按下两次1-3和4-6轴切换按钮,机器人转为4-6轴运动状态,调节好4-6轴为0度;再按下1次1-3和4-6轴切换按钮,机器人转为1-3轴运动状态,调节好1-3轴为0度。按下1次线性重定位按钮,机器人转为线性运动状态,向下摇动摇杆,机器人向X轴正向运动;向右摇动摇杆,机器人向Y轴正向运动;逆时针转动摇杆,机器人向Z轴正向运动。最后再单轴运动达到题目要求,不再赘述。
二、相关知识点说明:
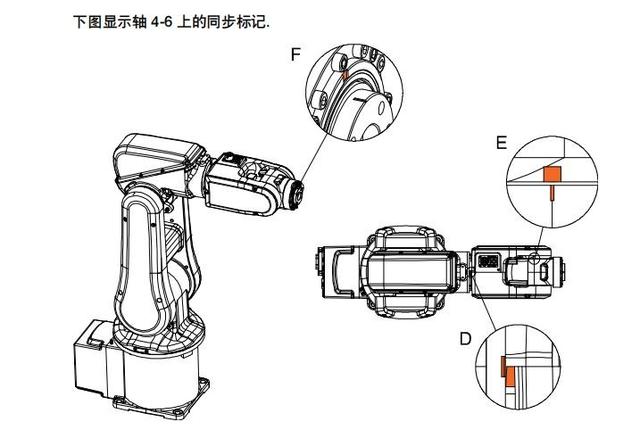
1、ABB机器人各轴同步标记(以IRB120为例):

2、线性、1-3和4-6轴切换

3、摇杆方向与运动方向对照:屏幕右下角位置显示摇杆方向控制轴运动或者线性运动 方向。

(1)线性运动状态:向下摇动摇杆,机器人向X轴正向运动;向右摇动摇杆,机器人向Y轴正向运动;逆时针转动摇杆,机器人向Z轴正向运动;

(2)1-3轴运动状态:向下摇动摇杆,机器人向2轴正向运动;向右摇动摇杆,机器人向1轴正向运动;顺时针转动摇杆,机器人向3轴正向运动;

(3)4-6轴运动状态:向下摇动摇杆,机器人向5轴正向运动;向右摇动摇杆,机器人向4轴正向运动;逆时针转动摇杆,机器人向6轴正向运动。
,