你知道载人飞船与空间站是如何实现精准对接的吗?你知道核潜艇在茫茫的大洋深处是如何知道自己的位置的吗?你知道导弹是如何像长了眼睛一样精确打击目标的吗?这一切都是因为惯性技术的存在!老郭今天就和您聊聊惯性导航技术。

1687年,英国物理学家牛顿在其出版的《自然哲学的数学原理》一书中提出了著名的“力学三大定律”,奠定了经典力学的基础。
其中,牛顿第一定律就是关于惯性的定律,即任何物体在没有受到外力,或者外力的合力为零时,物体将保持静止或者是匀速直线运动。牛顿将物体的这种总是保持自身原来运动状态的性质称为“惯性”。
由于任何物体都有惯性,所以就有了惯性力。牛顿第二定理给出了惯性力的计算公式:F=ma,即惯性力等于物体的质量与其加速度的叉乘,其方向为加速度的方向。

陀螺是日常生活中最常见的玩具,物理学家们的研究表明,一个旋转的物体,它的旋转轴在一个静止的空间(惯性空间)里能够保持方向不变,这就是陀螺的定轴性。物体旋转的速度越快,其保持方向稳定的能力就越强。
1905年,世界上第一台利用地球自转角速度和重力场的综合效应,使二自由度陀螺仪的自转轴自动寻找真北,可以实用的陀螺罗经诞生,被应用于航海上的舰船导航。与此同时,另外一种利用摆的原理、测量运动物体加速度的仪表——加速度计也诞生了。
这两种仪器的背后都是牛顿的力学原理,它们被统称为惯性仪表(惯性器件),利用惯性仪表测量值进行测量推算的导航被称为惯性导航。

只有惯性器件还不能实现真正的导航,因为还需要一个参考系。道理很简单,就如同我们告诉人家自己所在的位置的话,你一定要说我在某某广场某个角落一样。地球为我们天然提供了两个参考基准:真北和垂线。
所谓的真北,就是测量者所在的子午面与当地水平面的交线,这个方向指向地理北极的方向,称为真北方向。由于地球自转的角速度不受人为因素干扰,其角速度值在可观测时间内基本上是一个常数,因此,真北是惯性导航中非常重要的一条基准线。

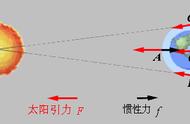
与地球形状直接相关的是地球的重力场特征,这里说的是重力,没有说引力,是因为,如果地球是一个均质球体,并且不旋转的话,则地球表面各点的引力都相等。
由于地球并不是一个标准球体,且自身还在做旋转运动,因此,地球表面上物体除了受到来自地球的引力之外,还受到地球自转带来的离心力的影响,物体所受到的重力是这两个力的合力,其方向并不是指向地心的。单位质量的物体在重力场的作用下所获得的加速度称为重力加速度。

有了惯性仪器,又建立了基于真北和垂线的坐标系,现在来看一下惯性导航系统是如何工作的。
加速度计的作用是实时测量载体运动的加速度,经积分运算得到载体的实时速度和位置信息。·在这个过程中,如何确保加速度计的输出是沿着导航坐标系的,是实现准确导航定位的基础。确保加速度计的输出沿着导航坐标系有两种办法:
办法一是利用陀螺稳定平台建立一个相对某一空间基准的三维空间导航坐标系,来解决加速度计输出信号测量基准的问题,即采用陀螺稳定平台来始终跟踪所需要的导航坐标系,陀螺稳定平台由陀螺仪来控制,加速度计安装在陀螺稳定平台上;
办法二是通过不同坐标系之间的变换,解决加速度计输出的指向问题,即加速度计和陀螺仪都直接固联安装在运载体上,陀螺仪的输出角速度信息用来解运载体相对当行坐标系的姿态变换矩阵,经姿态变换矩阵将加速度计的输出变换至导航坐标系,相当于建立了一个数学平台。

可以说,惯性导航系统就是以陀螺仪和加速度计为敏感元件,根据陀螺仪的输出建立导航坐标系,根据加速度计的输出并结合初始运动状态,推算出运载体的瞬时速度和瞬时位置等导航参数的解算系统。由此可见,陀螺仪和加速度计是惯性导航系统的心脏。
真理是朴素的,就是这些中学物理课本中的知识,成为了高科技装备中的核心技术。我国天琴计划发射的空间引力波探测器中就搭载了目前最精确的惯性导航设备。当然了,它的导航基准不是用的真北和垂线,而是遥远的恒星。
惯性真奇妙,没有它,很多现代化设备都不能正常工作。小伙伴们,关于惯性导航系统,你们还有什么想说的吗?欢迎在下方评论区留言参与。
,