右操作手柄
功能:建立斗杆挖掘和卸载、上车部分的左右回转的先导压力信号
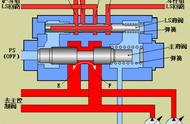
动作方法及工作原理:由操作手柄PPC产生的输出压力,随手柄行程的变化而变化,此输出压力便是使主阀开启的压力,此手柄控制四个动作:斗杆收放和左右回转。
出故障时在机械操作上的征兆:出故障时的主要表现为:操作斗杆和回转先导操作阀时对应的装置没有动作,或者是打开液压先导锁而没有操作先导操作手柄时就有斗杆或回转动作产生。

左行走操作杆
功能:建立左行走的前进和后退的先导压力信号
动作方法及工作原理:由操作手柄PPC产生的输出压力,随手柄行程的变化而变化,此输出压力便是使主阀开启的压力,此手柄控制两个动作:左履带的前进和后退。
出故障时在机械操作上的征兆:出故障时的主要表现为:操作左行走先导操作阀时对应的装置没有动作,或者是打开液压先导锁而没有操作先导操作手柄时挖掘机左履带会前进或后退。

右行走操作杆
功能:建立右行走的前进和后退的先导压力信号
动作方法及工作原理:由操作手柄PPC产生的输出压力,随手柄行程的变化而变化,此输出压力便是使主阀开启的压力,此手柄控制两个动作:左履带的前进和后退。
出故障时在机械操作上的征兆:出故障时的主要表现为:操作右行走先导操作阀时对应的装置没有动作,或者是打开液压先导锁而没有操作先导操作手柄时挖掘机右履带会前进或后退。

行走马达
功能:将液压油的压力能转换成旋转的机械能从而驱动机械的行走
动作方法及工作原理:柱塞式斜盘马达
出故障时在机械操作上的征兆:操作行走先导操作手柄时,履带不行走、行走无力、速度慢、跑偏严重。