气动机械手程序是一个比较复杂的入门基本程序,各种培训教材时有讲解。
对这个程序透彻理解,能帮助初学者对程序的架构更深刻地掌握。
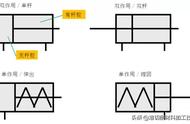
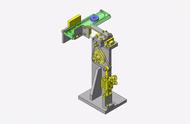
西门子1200/1500PLC的气动机械手搬运硬件组成包括:工件到位光电开关、升降气缸、平移气缸、夹抓气缸、气缸磁性开关等。
自动动作过程:工件到位光电开关亮→升降气缸降→夹抓抓取工件→升降气缸升→平移气缸到下料位→升降气缸降下→夹抓松开→升降气缸升→平移气缸到取料位等待下个工件。
开头的硬件组态都是差不多一样,重复一遍,加深印像。
一、组态一个PLC设备
1、新建一个项目,在项目中添加一个PLC设备。
2、配置PLC CPU模块的属性参数。
- PROFINET接口的子网。
- PROFINET接口的IP地址。
- 系统和时钟存储器开启。

3、按需要添加其他模块,分配好地址。
二、组态一个HMI设备
1、在项目树中,找到

,添加新设备,选择HMI型号,确定。
2、在“设备和网络”项目的“网络视图”中,用鼠标连接PLC与HMI的网口。如在启动向导时选择了PLC,则可省去这一步。
3、配置HMI的PROFINET以太网地址,与PLC为同一网段,不同网址。
以上2、3可以在添加HMI启动向导时自动完成。

三、编写PLC程序
1、新建一个PLC变量表,如系统比较复杂,可以把M区变量、I区变量、Q区变量分别建立变量表。
如为复杂控制系统,变量表最好与系统默认变量表分开。