集微网消息,今天,美国专利商标局公布了一份来自苹果的专利申请,它涉及使用机器学习计算系统绘制和跟踪位置信息。更具体地来说,本发明涉及实施机器学习操作,以监测视觉惯性里程计(VIO)系统的健康状况,例如同步定位和映射(SLAM)系统。
计算机视觉方法通常包括让计算系统从真实环境中提取和分析数字图像,以了解真实环境,并根据这些环境形成决策。
特别是,SLAM技术涉及自动确定设备相对于真实环境的位置,并在不需要预先了解环境的情况下创建真实环境的缩放几何模型。
创建真实环境的缩放几何模型也可以称为环境重建。SLAM技术的使用与许多应用相关,例如机器人系统或移动系统的导航、三维重建、摄像机姿态估计以及在未知真实环境中支持增强现实(AR)应用。
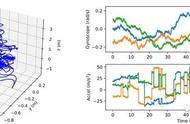
SLAM技术可以利用一个或多个摄像头和一个或多个惯性测量单元(IMU)来跟踪和更新未知的真实环境的地图。摄像头能够捕捉真实环境的图像,IMU能够捕捉与SLAM系统相关的测量值,如力、加速度、角速度或磁场。
SLAM技术依靠从图像和IMU数据中获取的信息,以相对较高的位置精度实时实现定位和绘图。给定一组时间结构图像和IMU数据,SLAM系统通常能够确定其在不同时间点的位置和方向。
不幸的是,位置和方向估计的准确性可能会随着各种因素而变化,比如SLAM系统体验的图像内容和运动类型。
苹果的发明涵盖了一种从一个或多个视觉惯性里程计(VIO)特征测量中确定健康值的方法。
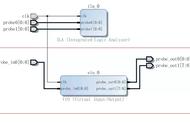
下面的苹果专利图2是一个计算系统的框架图,它可以估计VIO系统的运行状况。

今天,由美国专利局公布的苹果专利申请20190164040最初是在2018年第一季度提交的。(校对/Aki)
,