1.定义:在力的作用下绕着固定点转动的硬棒叫杠杆。
说明:①杠杆可直可曲,形状任意。
②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。
2. 五要素——组成杠杆示意图。

①支点:杠杆绕着转动的点。用字母O 表示。
②动力:使杠杆转动的力。用字母 F1 表示。
③阻力:阻碍杠杆转动的力。用字母 F2 表示。
说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。
④动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反
⑤动力臂:从支点到动力作用线的距离。用字母l1表示。
阻力臂:从支点到阻力作用线的距离。用字母l2表示。
画力臂方法:
一找支点、二画线、三连距离、四标签
⑴ 找支点O;
⑵ 画力的作用线(虚线);
⑶ 画力臂(虚线,过支点垂直力的作用线作垂线);
⑷ 标力臂(大括号)。
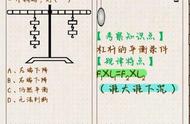
3.研究杠杆的平衡条件
①杠杆平衡是指:杠杆静止或匀速转动。
②实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是:可以方便的从杠杆上量出力臂。
③结论:杠杆的平衡条件(或杠杆原理)是:
动力×动力臂=阻力×阻力臂。写成公式F1l1=F2l2 也可写成:F1 / F2=l2 / l1
解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。)
解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动力臂最大,要使动力臂最大需要做到
①在杠杆上找一点,使这点到支点的距离最远;
②动力方向应该是过该点且和该连线垂直的方向。
4.应用:

说明:应根据实际来选择杠杆,当需要较大的力才能解决问题时,应选择省力杠杆,当为了使用方便,省距离时,应选费力杠杆。
二、滑轮