激光雷达测距测速原理和通用方程
1.激光雷达通用方程激光雷达方程用来表示一定条件下,激光雷达回波信号的功率,其形式如下:
为回波信号功率,为激光雷达发射功率,K是发射光束的分布函数,分别是激光雷达发射系统到目标和目标到接收系统的大气透过率,分别是发射系统和接收系统的透过率,为发射激光的发散角,分别是发射系统到目标和目标到接收系统的距离,为目标的雷达截面,为接收孔径。

激光雷达方程可以在研发激光雷达初期确定激光雷达的性能。其次,激光雷达方程提供了回波信号与被探测物的光学性质之间的函数关系,因此可以通过激光雷达探测的回波信号,通过求解激光雷达方程获得有关大气性质的信息。
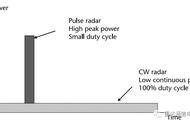
2.激光雷达测距基本原理2.1脉冲法
脉冲激光雷达测距的基本原理是,在测距点向被测目标发射一束短而强的激光脉冲,激光脉冲到达目标后会反射回一部分被光功能接收器接收。假设目标距离为L,激光脉冲往返的时间间隔是t,光速为c,那么测距公式为L=tc/2。
时间间隔t的确定是测距的关键,实际的脉冲激光雷达利用时钟晶体振荡器和脉冲计数器来确定时间t,时钟晶体振荡器用于产生固定频率的电脉冲震荡
T=1/f,脉冲计数器的作用就是对晶体振荡器产生的电脉冲计数N。
,