在上一篇文章中我们说到,什么是PID调整参数?我说了一些简单的受控过程示例,并解释了PID控制器的具体术语。
如前所述,我们可以启用每个参数:比例项,积分项和微分项。
现在让我们讨论一下这些参数是什么以及如何使用它们。
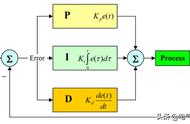
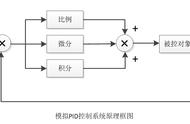
PID控制器用最简单的术语来说,控制器将计算P,I和D动作,然后将每个参数乘以误差或E,如前所述,该误差或E在直接作用下等于SP-PV。然后,将所有参数计算相加以产生控制变量。

然而,PID参数方面没有行业标准。以下是今天我要说的pid调试用法:
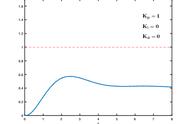
PID整定比例项比例项通常称为P常数,可以称为比例增益或增益,它不是单位而是比率。此参数也可以称为比例带,以百分比为单位进行度量。
该参数可以称为K P,增益或其他。这是确定系统响应速度的参数。引用的名称因制造商而异。
–对于使用术语“增益”的控制器,将其调整得更高可能会导致更敏感,更不稳定的环路。
–相反,在具有比例带单位的控制器上,减小此调整参数会以相同的方式影响环路。
请牢记这一点,了解你的控制器的类型对于确保正确调整参数至关重要。

经常称为“重置”的积分项或“ I常量” 也可以用不同的方式表示,例如:
–每秒重复一次,
–每秒钟重复一次,
–每分钟重复一次,
–每次重复分钟。
不管测量类型如何,积分都是从信号报告的所有值得总和,从开始计数到完成计数或绘制曲线下的面积时捕获。该参数可以称为K i,T i或其他。此参数确定消除稳态误差的速度。

由于测量值不同,此参数调整可能不太直观。
简而言之,每分钟重复测量的分钟数较小将产生较大的积分作用,而每分钟重复测量的较大值将产生较大的积分作用。