PID在控制领域应该是应用最为广泛的算法了,在工业控制,汽车电子等诸多领域中运用
下面我用一个例子和算法过程来讲解PID的概念
PID:
P比例控制:基本作用就是控制对象以线性的方式增加,在一个常量比例下,动态输出
缺点:会产生稳态误差
I积分控制:基本作用就是用来消除稳态误差
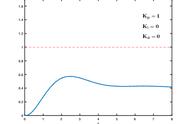
缺点:会增加超调
D微分控制:基本作用就是减弱超调,加大惯性响应速度
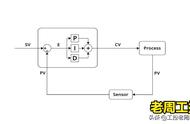
1、什么是PID及其作用

上图描述: 设定一个输出目标,反馈系统传回输出值,如与目标不一致,则存在一个误差,PID 根据此误差调整输入值,直至输出达到设定值.
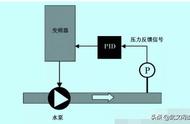
为什么需要PID呢,比如控制温度,我们需要设置一个要达到的目标温度值,当将温度稳定在目标温度值
例如,我们希望水的目标温度值为70°,其希望无非就是可以快速而且无抖动的达到70°,并稳定在70°
如果我们使用普通的方式加热,当温度到达70°后就以及停止加热,岂不是简单快速,当然用在要求不高的场合也可以,但是如果要求更高的场合呢,会出现温度到达70°后,由于加热器的余温会使温度继续上升,并且再加上环境的温度会散热,所以我们无法将水温很平稳的稳定在70°

总结一下:我们需要PID的作用无非就是无法通过普通控制手段快速稳定的输出到目前设定值
2、公式

经过化解后的公式