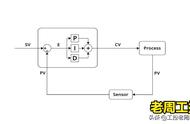
设Kp=0.4,Ki= 0.3,Kd=0.3,水位0.2,目标水位1
第一次,误差是 e(1)=1-0.2=0.8m,那么加入水量是 Kp0.8 = 0.40.8 = 0.32m , KI * e(1) = 0.3 * 0.8 = 0.24 , KD = 0 (因为当前水位差就是0.8) 加入水量 = 0.32m 0.256 = 0.56 当前水桶水位:0.2 0.276 - 0.1=0.66
第二次,误差是 e(2)=1-0.66=0.34m,那么加入水量是 Kp0.34 = 0.40.34 = 0.136m , KI * (e(2) e(1)) = 0.3 * 0.342 = 0.342 , KD (e(2) - (e1))= 0.3(0.342 - 0.8) = -0.138 加入水量 = 0.136m 0.342 -0.138 = 0.34 当前水桶水位:0.66 0.478 - 0.1=0.9

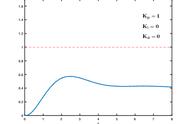
有明显的削弱超调
结论: 微分能够减弱超调趋势.
为了更明显对比三个系数的关系,我们进行计算对比,看下图
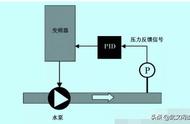
设初始水位0.2,目前水位1,流出水位0.1,KP=0.4,KI=0.3,KD=0.3
首先是数据对比