问题来了,水位最终在0.75m 处稳定了,但是,当误差是0.25m 时,加水量时0.1,每次加入的刚好等于漏掉的0.1.
这里就引入了稳态误差的概念:即当系统到达稳态时与目标的误差.
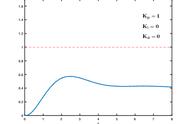
当我们加大KP时,增加值1

已经更接近目前值了,当我们继续增加呢

当增加值1.8时,已经非常接近1m的水量了,但是也出现了非常大的抖动
结论: 比例控制引入了稳态误差,且无法消除.比例常数增大可以减小稳态误差,但如果太大则引起系统震荡,不稳定.

为了消除稳态误差,第二次加入积分,使用PI(比例积分控制)
积分控制就是将历史误差全部加起来乘以积分常数.
一样的情况,现在设Kp=0.4,Ki= 0.3
第一次,误差是 e(1)=1-0.2=0.8m,那么加入水量是 Kp0.8 = 0.40.8 = 0.32m , KI * e(1) = 0.3 * 0.8 = 0.24 加入水量 = 0.32m 0.256 = 0.56 当前水桶水位:0.2 0.276 - 0.1=0.66
第二次,误差是 e(2)=1-0.66=0.34m,那么加入水量是 Kp0.34 = 0.40.34 = 0.136m , KI * (e(2) e(1)) = 0.3 * 0.342 = 0.342 加入水量 = 0.136m 0.342 = 0.478 当前水桶水位:0.66 0.478 - 0.1=1.038