仔细查看三个图的最终水量的变化,
只有KP情况下,第一张图水位无法达到目标水位
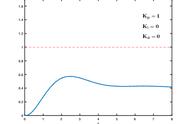
有KP和KI情况下,第二张图水位达到目标水位,但是出现超调
有PID的情况下,第三张图在出现超调后,KD马上进行的减小,有效抑制了超调
说明:PID三个参数是随意设定,所以在调整时,需要不断测试及根据经验调试
下面用曲线图对比



此参数只是参考,具体PID参数的设置需要不断尝试,直到达到标准
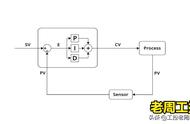
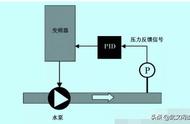
如果运用在电机控制领域,同样在控制输出给电机的电流大小,一般通过PWM去控制输出的电流量,通过反馈的采样电阻得知当前的电机转速,也就是说,我们设定目前转速,采样当前电机转速,去调整PID三个参数,经过不断尝试达到预定状态,但是在控制电机时,会涉及到电机的开环和闭环,开环简单来说就是电机加速的过程,相当于电机从0到预定转速并平稳后的过程,而闭环就是后续稳定的运行过程,如果图中所示