在最近的几年,越来越多的设备搭载了ToF传感器,并且在产品上进行了众多的应用,并且在众多的场景下得到了很好的使用,那么什么是ToF呢?能带来什么样的作用?
我们先来了解一下什么是ToF
ToF的全称是 Time-of-Flight,翻译为中文就是飞行时间,是属于LiDAR(激光雷达技术)的一种,也是属于现阶段的主要3D识别技术之一。其原理主要是通过向场景中发射近红外光,利用光的飞行时间信息,测量场景中物体的距离,以此可以测量出中距离的空间。和3D结构光有所不同的是,虽然二者同样利用了红外光,但是3D结构光是利用光学衍涉器件将红外光产生的激光光束阵列继续复制并且发射,随后采用红外COMS对被照射物体所产生光斑大小及形态进行分析,从而获得深度信息。但是因为光束分布、光衰减及算法上的限制,其覆盖范围比起ToF更近,但却可以实现以更高的激光束密度换取更高精准度的效果。因此在苹果的Face ID上就采用了3D结构光的设计,实现更好的体验。

△苹果的3D结构光
ToF的分支:
在现阶段,ToF分为dToF(direct)和iToF(indirect)两种。其中dToF,全称是direct Time-of-Flight。顾名思义,dToF直接测量飞行时间。其原理是通过直接在发射端使用纳秒甚至皮秒级的短脉冲激光,并且在发射后也能很快的进行反应,很快的接收反射回来的激光。所以需要更高进度的Single Photon Avalanche Diode(SPAD 具有单光子探测能力的光电探测雪崩二极管)或者APD(雪崩光电二极管)进行探测。

在dToF上,其利用记录发射脉冲和接收脉冲之间的时间间隔,进行距离的计算。dToF会在单帧测量时间内发射和接收N次光信号,然后对这些时间进行分析统计,并且得出到最后的距离。
但现阶段,由于需要对光脉冲飞行时间、接收时间进行良好的同步判断,其对于算法、硬件的要求较高。在此前只有大部分的高端汽车采用了的dToF,直到苹果将此技术运用在iPad和iPhone上。
dToF之外还有另一个分支—iToF,(indirect Time-of-Flight)顾名思义就是采用间接飞行时间来揭晓距离的判断。其原理是把发射的光波调制成一定频率的周期性信号,通过测量发射信号和该信号经过被测物反射回来到达接收端时的相位差,间接计算出光的飞行时间,从而得到深度的数据。由于其原理的不同,其可以利用多次的周期性型号对相位差进行判断,在实际使用过程中,由于采用了周期性频率波的策略,所以为了更好的保障精度,需要在使用接收到的次数越高更好,因此距离越远,两个周期的波长会变得较难分辨,会产生干扰的情况,所以在应用距离上较短,并且相比较于dToF存在易被强光干扰的情况。


△两者的对比
实际的应用差距:
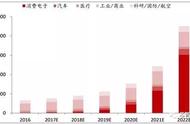
从成本上来说,由于dToF需要更高精度的发射、接收设备,并且还需要在两者间进行时间的同步判断等情况,所以在实际使用中,dToF会相比较于iToF增加一定的成本。但是,iToF的成本更低,可以在更多的设备上配套使用,达到对于距离的推测,也可以说是目前很多搭载ToF设备的第一选择。

从精度来说,dToF无法做到很高的图像分辨率,而iToF由于其原理的差异,其传感器尺寸需要更大的尺寸接收光的波长变化,所以可以实现更高精度的图像分辨率,所以在进行物体识别、3D重建等等方面相比较于dToF具有更高的优势。
从功耗来说,dToF采用的脉冲波发射相比较于iToF的连续波拥有更低的占空比,可以在相同时间内发射更有针对性的光源,两者相比较来说dToF的功耗会更小,更加适合在电量较小的设备上使用。

最后来谈谈两者现阶段的应用场景,dToF功耗低,体积小适合于在较小的设备使用,并且由于抗扰性较好,在户外的使用上也更胜一筹。并且由于dToF的原理,测量距离增大时精度不会大幅衰减,能耗也不会大幅提升,诸如苹果所选择的在AR方向利用是一个很好的发展方向。
而iToF的图像分辨率较高,在物体识别,3D重建以及行为分析等应用场景中能够重现场景中更多的细节信息,所以在扫地机器人(进行避障)、新零售。迎客机器人上拥有较好的使用场景。
,