在发射端我增加了一个按键,当按键没按下时,Arduino的D3号脚检测到的是低电平,因为直接接一个10K电阻到负极了嘛,所以是0。当按键按下时,接通5V的直流电到D3号端口,D3号端口又对地接一个10K电阻,所以在端口这里得到的是高电平,是1。
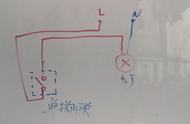
好,看接收端,如下图:

我在接收端的Arduino D3号脚接了一个4.7K欧姆的电阻和8550三极管,用来驱动蜂鸣器。当我们从D3给一个低电平的时候,蜂鸣器就会响起来,蜂鸣器负极的100Ω的电阻是限流电阻。
接下来讲一下编程思路:当发射端检测到我按下这个按键时,也就是检测到一个高电平时,就把这个高电平的数据发送到接收端,接收端接收到这个高电平的数据后就输出一个低电平,驱动蜂鸣器响起来,否则输出一个高电平,蜂鸣器不响。在这里不详细讲2.4G模块的具体设置方式,我只讲整体程序的实现过程。
在开始编程前我们需要下载一个库,就是别人编好的函数与例程,到时候方便我们直接调用。这个库可以自己到github去下载,也可以私聊我要,库名称是RF24-master,下好后把它丢到我们安装Arduino这个软件的根目录下的libraries文件夹中就可以了。
好,看程序,下图是发射端的程序:

红色方框1中#include是我们要引用的程序库,把它们包含进来。红色横线2是定义Arduino3号引脚把它命名为buttonPin,后面当出现buttonPin的地方说明是要控制3号引脚。往下,红色横线3是定义一个整型变量buttonState,用来存放按键的键值。
看到下面这张图片:

红色横线1的语句是把7脚设置为CE脚, 8脚设置为CSN脚。红色横线2是设置通讯通道地址00001,接下来红色方框中的是初始化函数,先设置3脚为输入引脚,启动nRF24模组,设定通道地址。在这里多说几句,nRF24L01模块在2.4GHz~2.525GHz这个频带上,在这个频带上划分了0-125個频道,我们通过程序可以自由设定使用的频道,只要发射端和接收端所处的频道相同就可以了。然后每个频道内可容纳6个通道(pipe),每个通道可对应一个发射器;一个接收器可接收来自6个发射器的讯号。一个频道内,至少要有一个发射器和一个接收器,才能连线通讯。发射器可以位于0-5任一通道,并且指定一个唯一的地址值。接下来是设定广播功率,设置功率为RF24_PA_MIN,然后停止侦听,就是设定成发射模式。