控制启动模式操作
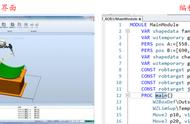
3.此时弹出EXTENDED AXIS SETTING PROGRAM界面,即外部轴设置程序,在此可以对机器人行走轴参数进行配置,配置参数如下表所示。

行走轴配置参数表
以上参数全部配置完成后,在虚拟示教器中输入0,然后点击Enter按钮,机器人行走轴参数配置完成。

退出行走轴参数配置
4.参数配置完成后在虚拟示教器上点击“FCTN”按钮,然后选择“START (COLD) ”,点击Enter按钮,机器人开始重启,等待重启完成。

机器人冷启动
三、在机器人库中添加行走轴数模Roboguide软件中已经自带了机器人行走轴模型库,本期我们利用这个模型库来建立一个机器人行走轴,当然也可以从外部导入自定义数模作为行走轴,本期暂不介绍。
点击“Tools”菜单,在弹出的下拉菜单中点选“Rail Unit Creator Menu”,弹出Rail Unit Creator对话框,选择合适得行走轴参数,然后点击Exec按钮创建行走轴。