双机器人与变位机编程
1.如下图,双机器人 变位机系统,使用Multimove,(即一台控制器,一个示教器,三个运动任务)

2.机器人需要有multimove选项 604-1或者604-2
604-1能够实现多机器人在一个坐标系协同运动,604-2只能半联动,即机器人同时开始,过程中各走各的

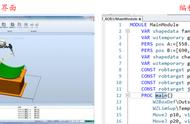
3.多任务生产窗口如下图

4. 运动过程如下:
A) 两台机器人在Home位置,变位机从上料位置转到焊接位置
B) 两台机器人走到准备焊接位置
C) 1#机器人开始焊接第一段,完成后走到ready_1位置
D) 1#焊接完成后,2#机器人焊接,完成后走到ready_2位置
E) 两台机器人一起回各自Home
F) 变位机转到上料位置
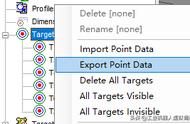
5. 要实现多机器人(变位机)间简单通讯,需要在程序数据里各自的任务建立task数据,如下