更多内容请点击 R工控人 关注
********************************
如何获取更多经典文章?
关注 R工控人,定期分享实用资料与技术解答!!!
前 言
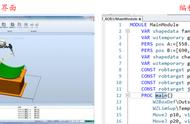
ROBOGUIDE软件称之为离线编程,在离线编程时,经过调试,需要将程序导入到实际的控制装置中,并且无需利用存储介质(如MC、U盘)快速将程序进行传输。本篇文章将采取Robot Neighborhood插件作为讲解。本篇文章注意事项:不许将虚拟机器人的系统变量文件(.SV, .VR, .IO等。但数值寄存器文件NUMREG.VR、位置寄存器文件POSREG.VR除外)可读入到实机中。
使 用
第一部分:准备
1. 以上所有备份AOA
在使用该功能之前,需要将以上所有备份放置电脑上,利用ROBOGUIDE从备份创建工作单元,以保证实际机器人与ROBOGUIDE虚拟机器人的系统及配置完全一致。
2. ROBOGUIDE软件
RG软件需要使用ROBOGUIDE_9A版本及以后,本次教程使用的RG版本为9.3KBata。
3. 网线
需利用网线连接控制装置的以太网口,如果有多台机器人你可以使用HUB,更多可以使用路由。通过HTTP界面对指定端口确认分配了iP地址,并将网线连接至电脑,利用iPV4手动分配本地计算机与机器人处于同一个网段,详细请参照发那科30iA 2DiRVision 视觉—连接篇。
第二部分:使用
1. Robot Neighborhood连接
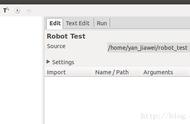
在以下路径找到frrndemo.exe程序
C:\Program Files (x86)\FANUC\Shared\Utilities\frrndemo.exe
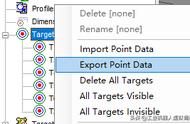
双击运行该程序,你将得到如下画面:
|

双击父目录RobotNeigjborhood,得到以下界面:
|

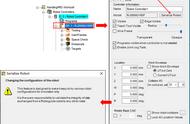
在New Entry分组框中选择FRCRNRealRobots Type,并在输入框内输入机器人的iP地址,在Name指定虚拟名字,IP与名称指定好后,点击ADD。这里由于没有实际机器人测试,采用两个虚拟控制系统来演示。实际iP请使用与电脑同网段的HTTP界面分配的iP地址,注意端口号。
|

添加完毕后,选择Close,返回主界面。
栏目热文
文档排行本站推荐
Copyright © 2018 - 2021 www.yd166.com., All Rights Reserved. |