弧焊焊接起始点接触寻位是工业机器人常用的一种工件位置偏差搜索检测方法,对于FANUC机器人,这个功能是通过接触式传感器功能来完成的。
接触式传感器功能,是在焊接工件出现安装误差时,为补偿该误差而自动地变更机器人路径的一种功能。
接触式传感器功能由如下基本功能构成:
依据预先设定的探索速度、探索方向数据,使接触式传感器部分(焊丝尖端或激光焦点)向着焊接工件移动。
使用数字量输入信号,检测机器人接触式传感器接触到焊接工件的事实。
将已搜索到的焊接工件的绝对位置值或距离原始位置的偏差值存储在指定的位置寄存器中。
根据已存储的绝对位置信息或偏差信息,使机器人移动到当前的焊接工件的焊接起始点位置。
在ROBOGUIDE软件的虚拟仿真环境中,FANUC机器人同样可以实现焊接起始点寻位功能,它使用的是虚拟接触式传感器,其搜索检测效果与真实的接触式传感器没有任何差别。
本期,就来介绍一下在ROBOGUIDE软件中机器人弧焊焊接起始点寻位虚拟仿真的操作方法。
使用软件版本:ROBOGUIDE V9.4
机器人弧焊焊接工作站创建FANUC机器人接触式传感器功能的虚拟仿真必须在ROBOGUIDE软件的WeldPRO模块环境中使用,并在创建机器人的虚拟系统时添加Touch Sensing(J536)、Arc Weld Utility Pkg(R876)两个系统选项,其中前者为接触式传感器系统功能选项,后者为弧焊焊接实用程序包。
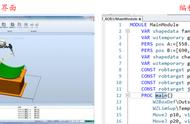
在工作站中添加机器人外围设备,如焊装夹具、弧焊焊枪、工件、清枪器、焊接电源、控制柜、气瓶等,并将其分别安装布局到合适位置,效果如下图所示。

对于高版本的ROBOGUIDE软件,在创建完工作站后,还要单独配置机器人弧焊焊接系统,详细配置方法已在名为《ROBOGUIDE软件:FANUC机器人弧焊焊接系统配置与虚拟仿真》文章中发布,可参考配置。
机器人虚拟接触式传感器添加与配置ROBOGUIDE软件中机器人弧焊焊接起始点接触寻位功能使用的是虚拟接触式传感器,在使用前需要先对其添加与配置。
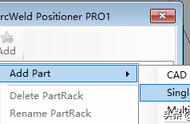
左侧Cell Browser中的Parts节点下展开添加的工件模型文件,可以看到其下包含一个Touch Sensors文件。右击Touch Sensors,然后选择“Add Touch Sensor”,弹出Touch Sensor对话框。
在Touch Sensor对话框中可以配置用于自动生成机器人接触式传感器工件搜索程序的相关参数,各选项卡功能介绍如下:
General:设置用于自动生成机器人工件接触式搜索程序的常规选项,如程序名称、机器人控制器、机器人组、工具和用户坐标系等。
Program:设置机器人接触式传感器条件和搜索运动参数。
Touch Frame:设置接触式传感器的参考坐标系。
Seach 1:设置机器人自动搜索方向与搜索起点位置标定,通常设置为沿X轴方向搜索。
Seach 2:设置机器人自动搜索方向与搜索起点位置标定,通常设置为沿Y轴方向搜索。
Seach 3:设置机器人自动搜索方向与搜索起点位置标定,通常设置为沿Z轴方向搜索。
Processes:设置用于自动生成机器人工件接触式搜索主程序内所包含的子程序。
一般情况下,在General选项卡内的Frame后选择接触式传感器使用的用户坐标系即可。对于需要自动生成机器人接触搜索程序的,可以在各选项卡中设置相关参数,然后点击“Generate TP Program for Touch Senser”按钮,程序就会自动生成。

属性参数配置完成后,在Touch Sensors文件下就创建了一个虚拟接触式传感器。
接触式传感器I/O信号配置与真实的接触式传感器一样,虚拟接触式传感器也是通过I/O信号与机器人实现信息交互,这里就需要创建下虚拟接触式传感器与机器人虚拟控制器之间的I/O信号映射关系。
打开虚拟示教器,按“MENU”键,在弹出的菜单中依次选择“设置”→“接触感应器I/O”,虚拟示教器显示界面切换为碰触传感器I/O设置。

在碰撞传感器I/O设置界面中,可以设置接触式传感器类型、输入信号与输出信号。控制器支持分配的I/O信号包括机器人I/O信号、通用数字量I/O信号、焊接数字量I/O信号以及熔敷检测I/O信号,可以根据实际情况酌情选取。有关接触式传感器I/O信号的设定值及其详细说明如下表所示。
序号 | 名称 | 设定值 | 说明 |
1 | Touch Sensing type | Wire Touch | 包括Wire Touch、Laser Sensor |
2 | 输入信号端口类型 | RI | 接触式传感器的接触检测信号属性 |
3 | 输入信号端口编号 | 1 | 接触式传感器的接触检测信号编号 |
4 | 输出信号端口类型 | RO | 接触式传感器的接触控制信号属性 |
5 | 输出信号端口编号 | 1 | 接触式传感器的接触控制信号编号 |
现实中的机器人焊接起始点接触寻位是通过焊丝与工件的接触实现的,在虚拟仿真环境中也是如此,它是通过焊丝模型与工件模型接触,并发出一个反馈信号给机器人。这样,就需要在虚拟仿真环境中给机器人模型添加一个接触检测反馈的I/O信号。
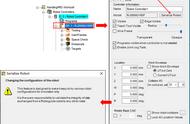
打开机器人模型的属性配置对话框,在General选项卡中的Collision I/O功能区内,On collision, set后选择“RI[1]”,作为焊丝模型与工件模型碰触的检测反馈信号。通常情况,这个信号必须与上一步中设置的接触式传感器输入信号保持一致。
同时,勾选“Show robot collisions”选项,这样机器人与工件发生碰触时,会显示出碰触效果。