接触式传感器坐标系决定搜索动作中机器人的TCP运动方向,接触式传感器坐标系由3个示教点来定义。最初的位置为原点位置,即搜索起点;第2个位置,定义接触式传感器坐标系的 X方向;第3个位置,定义接触式传感器坐标系的 Y方向;接触式传感器坐标系的Z方向由已被定义的X、Y轴自动生成。
碰触传感器I/O设置界面中,按“F1 类型”键,在弹出的类型菜单中选择“接触坐标系”,进入碰触传感器坐标系设置界面。

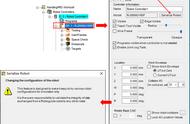
接触式传感器坐标系的设定方法有两种:示教标定法和直接输入数值法。示教标定法是对将要作为接触式传感器坐标系的3个参考位置分别进行示教,并对每一个参考位置进行标定。直接输入数值法是通过输入对象的旋转角度来定义接触式传感器坐标系,成为旋转对象的坐标系,依据参照组设定的不同而有所不同,通常情况下参照组设定为1时,旋转对象的坐标系为用户坐标系。
在一般的系统中,碰撞传感器坐标系设置画面中的参照组均设定为1(接触式传感器坐标系与机器人的用户坐标系相关)。希望在含有协调运动的系统中相对协调(参照)组定义接触式传感器坐标系时,将参照组设定为2以上的数值。
根据实际情况,示教标定接触式传感器坐标系。当然,此步骤也可以在Touch Sensor对话框里的Touch Frame选项卡内完成。
接触器传感器条件设置要想接触式传感器发挥出最佳检测效果,还需要设定接触式传感器的执行条件,即接触式传感器条件设置。在接触式传感器条件中,可以设定机器人执行搜索动作的动作条件,系统默认提供32个接触式传感器条件文件,可根据不同的搜索情景进行设定和调用。
机器人虚拟示教器操作面板上,按“DATA”键,然后在数据界面中按“F1 类型”键,在弹出的类型菜单中选择“碰触传感器设置”,进入碰撞传感器数据设置界面。
首先进入的是碰触传感器条件数据一览画面,在其中可以查看或设定一些典型的条件参数,如碰触传感器条件编号、探索速度、探索距离、碰触传感器坐标系、基准标识、机器人组掩码。
选择其中一个碰触传感器条件文件,按“F2 详细”键,显示界面切换为碰触传感器条件数据详细设置。

根据实际需求,设定相关参数值,各个设定项的详细说明及参考设定值如下表所示。
序号 | 名称 | 设定值 | 说明 |
1 | 碰触传感器设置 | 1 [Touch Schdule 1] | 接触式传感器条件编号与注释 |
2 | 基准标识 | OFF | 打开后,将机器人接触到的位置作为计算偏置量的基准位置并存储,记录完成后再将其关闭 |
3 | 探索速度 | 5.0mm/sec | 机器人搜索运动速度 |
4 | 探索距离 | 100.0mm | 机器人搜索运动距离 |
5 | 碰触传感器坐标系 | 1 | 搜索运动参考坐标系编号 |
6 | 探索模式 | 简易检索 | 包括简易检索、角焊缝/搭接检索、V坡口检索、外径/内径检索 |
7 | 探索类型 | 2_D平移 | 包括1_D平移、2_D平移、3_D平移、1_D平移&旋转、2_D平移&旋转、3_D平移&旋转 |
8 | 增量探索 | ON | 通过第1个搜索动作获得的偏置量,对第2个以后的搜索开始位置进行偏置处理 |
9 | 自动返回 | ON | 接触到工件时,机器人自动返回搜索开始位置 |
10 | 返回速度 | 500mm/sec | 机器人返回运动速度 |
11 | 返回距离 | 2000.0mm | 机器人返回运动距离 |
12 | 参照组 | 1 | 设置值与机器人组掩码相同 |
13 | 返回动作终止类型 | FINE | 机器人返回运动的定位类型 |
14 | 检索位置输出寄存器 | 32 | 搜索位置缓存寄存器 |
15 | 失败时的错误输出 | ON | 打开后,机器人在超过指定的搜索距离时报警 |
16 | 错误寄存器编号 | 32 | 搜索错误标识寄存器 |
17 | 机器人组掩码 | [1,*,*,*,*,*,*,*] | 在该接触式传感器条件下生效的机器人组 |
18 | 碰触传感器类型 | 焊丝 | 包括焊丝、激光传感器 |
19 | 激光信号极性反转 | OFF | 激光信号生效极性 |
由于机器人使用的是焊丝与工件接触碰撞实现的焊接起始点寻位,所以还需要激活弧焊焊枪工具模型与工件模型的碰撞检测效果。
在机器人弧焊焊枪工具属性设置对话框的General选项卡中,勾选“Show collisions”选项,激活工具模型接触碰撞检测效果显示功能。
在工装夹具属性设置对话框的General选项卡中,勾选“Show robot collisions”选项。然后在Parts选项卡中勾选“Show collisions”选项,激活工件模型接触碰撞检测效果显示功能。
机器人接触式传感器指令介绍在FAUNC机器人中接触式传感器功能要使用专门的指令创建出接触式传感器程序,来实现对工件的搜索检测和对所示教的位置的偏置处理。
通常情况下,在机器人中编写的接触式传感器程序包含两种指令,一种是接触式搜索指令,用于控制接触式传感器的开启与关闭,同时命令机器人执行搜索检测动作,并根据反馈信号记录工件的当前位置;另一种是接触式偏置指令,这种指令能够把接触式搜索指令中记录的工件偏差位置叠加到基准程序中,使机器人按照偏移后的示教点执行指令运动。
接触式搜索指令由接触搜索开始指令、接触搜索结束指令、接触搜索动作附加指令组成,接触搜索开始指令如下图所示,该指令用于设定接触传感器条件和位置存储寄存器,并打开接触式传感器。

接触搜索结束指令(Search End)用于关闭接触式传感器,指令格式较为简单,且没有可设定的指令参数,直接插入使用即可。
在接触搜索开始指令与接触搜索结束指令之间,还要插入接触搜索动作附加指令,这种指令是一种添加在运动程序语句末尾的附加指令,指令格式如下图所示。本指令为控制机器人开始搜索运动的指令,k用来指定搜索运动方向,可设定为X、-X、Y、-Y、Z、-Z中的任意一个,有关X、Y、Z的具体运动方向,由在接触式传感器条件中指定的接触式传感器坐标系来决定。并且,在机器人(TCP)接触到工件时,将当前位置存储到搜索输出位置寄存器中。