4)设置起始点,传送带结构,传送带长度

5)创建连接

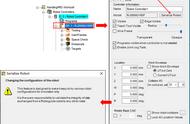
6)设置偏移(同步开关到开始窗口距离),启动窗口宽度(如图所示的启动窗口,即产品进入启动窗口区域且机器人空闲,机器人会去跟踪产品),完成后控制器会重启

添加输送链对象

4)设置起始点,传送带结构,传送带长度
5)创建连接
6)设置偏移(同步开关到开始窗口距离),启动窗口宽度(如图所示的启动窗口,即产品进入启动窗口区域且机器人空闲,机器人会去跟踪产品),完成后控制器会重启
添加输送链对象











Copyright © 2018 - 2021 www.yd166.com., All Rights Reserved.