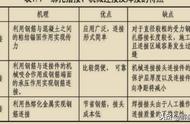
纯跟踪控制(Pure Pursuit)是一种典型的横向控制方法,最早由 R. Wallace 在1985年提出,具有较好的鲁棒性。
基本思想:基于车辆后轮中心位置,在参考路径上选取一个预瞄点,计算预瞄点和路径偏差,对方向盘转向控制量进行计算。
前轮反馈控制(Front wheel feedback)又称 Stanley 控制,利用 前轮中心 的 路径跟踪偏差量 对方向盘转向控制量进行计算。
后轮反馈控制(Rear wheel feedback)是利用后轮中心的路径跟踪偏差量来进行转向控制量计算的方法。
基于车辆运动学模型的方法忽略了车辆的动力学特性 因此在车速过快 或者曲率变化率过大的情况下该算法无法满足车辆的稳定性控制要求。这时就需要用到基于车辆动力学模型的横向控制方法,通常将车辆动力学模型简化为二自由度的动力学模型。

对于基于车辆动力学模型的控制方法,首要的工作是对车辆动力学进行建模 由于车辆动力学模型具有很强的非线性时变特性,因此精确建模整个车辆动力学十分困难。在横向控制中,主要关心的是车辆的横向运动特性,假设车身的纵向速度Vx 保持不变, 其横向动力学模型的两个自由度为:横向运动和横摆运动。

由于精确的二自由度动力学模型是非线性的,为了便于进行实时的跟踪控制计算 通常还需要在精确的二自由度动力学模型基础上进行一些简化近似,得到线性二自由度动力学模型。
在给定的前轮转角输入下,可以得到车辆的横向位移、横向速度、横摆角以及横摆角速度的响应。但是横向跟踪控制的目的是为了减小跟踪偏差需要的状态方程是能够分析在给定的前轮转角下车辆跟踪偏差的响应, 这些偏差通常是:横向位置偏差、横向位置偏差变化率;横摆角偏差、横摆角偏差变化率。
前轮转角控制输入作用下,车辆路径跟踪偏差的响应特性、期望的响应特性就是 跟踪偏差能够快速、稳定地趋近于零,并保持平衡 同时前轮转角控制输入又尽可能小,这就是一个典型的多目标优化最优控制问题 且优化的目标函数可以表示为跟踪过程累计的跟踪偏差与累计的控制输入的加权和。