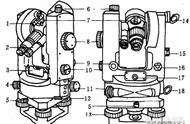
图二
示意图
(二)精密定向
按上述定向方法望远镜指向了近似北方向,精密定向一般采用跟踪逆转点法。
将水平微动螺旋放在行程中间位置,固定经纬仪照准部,起动陀螺,到达额定转速后,待陀螺马达运转3分钟后,缓慢地放下陀螺灵敏部,并进行限幅,使摆幅不要超过水平微动螺旋行程范围,用微动螺旋跟踪,跟踪要做到平稳和连续,更不要触动仪器各部位。
陀螺轴在子午线左右摆动如(图二)曲线。在摆动平衡位置上,光标像行进速度最快,当接近逆转点时,好像停留片刻,此时应准确地使光标像与分划板零刻线重合,迅速地把逆转点相应于水平度盘的读数读出来,记入记录表中。随即向反方向继续跟踪,这样连续观测4〜5个逆转点后托起陀螺灵敏部,制动陀螺停转。
跟踪时除读定水平度盘读数外,还需用秒表记录连续两次经过同一方向逆转点的时间,即跟踪摆动周期Ti,它对计算是无用的,但可以反映陀螺工作是否正常,以及判定逆转点是否已经到达。
陀螺摆动平衡位置Nt就是陀螺子午线的位置。参照图示和记录表,按下列公式计算:

以一个测回测定待定测量方向值为A,待测定测线陀螺方位角为:

陀螺经纬仪记录表

来源:测绘人的笔记
如有侵权,请联系删除
文章仅用于学习交流,版权归原作者所有,如有问题,请及时与我们联系,我们将第一时间做出处理。
,