机器狗关节

机器狗关节示意图
三、运动特性
机体支撑倒立摆运动、重心颠簸起伏、机体重心自扰动、肢体往复加减速运动构成了机器狗的基本运动特性。机器狗的多肢体旋转形成的支撑倒立摆结 构,每段肢体在任何情况下都不是直线运动而是旋转运动。为使机器狗能够处于平稳的运动状态,必须保证力和扭矩的输出能刚好满足对应肢体的实际动力需求,也就是恰到好处的油压值及流量输出。不断的规划、不断的检测、不断的反 馈、不断的调整输出,构成了机器狗运动控制的基本常态。

重心起伏(左)和肢体旋转(右)
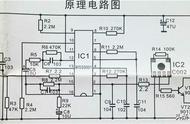
四、液压动力系统
机器狗液压动力系统主要包括:汽油发动机、变量活塞泵、液压油箱、油压总路、蓄电 池、16 个电液伺服阀和 16 个子液压执行器等,如下图所示。
电液伺服阀是机器狗最复杂的器件之一。借助电液伺服阀的优良性能可实现液态能量精确控制。电液伺服阀的最显著特性是具有增压的功能。电液伺服阀的电动机借助蓄电池的电能启动旋转,同 步带动泵旋转,把从总路引入至子路的油压实施进 一步增压。电液伺服阀可及时弥补由于传输损耗造成的油压值不足,使得动力系统的输出始终能够跟上动力学规划的输出要求。
机载蓄电池需要给如下主要器件提供稳压电能输出:两台机载计算机、所有传感器、 机载通信装置、16 个电液伺服阀、两台散热风扇。

液压驱动系统示意图 液压驱动系统示意图
好了,这篇文章就到这里,后面的两篇文章中,我们会对机器狗的运动控制系统、自主控制系统、导航与软件、以及机器狗存在的问题等内容进行讲解。
,