汽车零部件机器人焊装夹具气路设计过程可分为夹具设计、气路图设计、气路安装施工3个阶段,本文将针对此3个阶段顺序给出气路图设计的一般方法,并根据实际应用中的一些共性问题,针对气路运用中的实际问题给出解决方案和优化建议。
一、机器人焊装夹具气路的组成结构
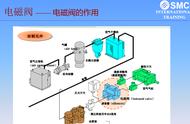
汽车零部件机器人焊装系统的基本气路结构如图1所示。包括能源装置、执行装置、控制调节装置、辅助装置、传动介质等部分。

图1 汽车零部件焊装夹具气路系统基本组成
二、机器人焊装夹具气路设计
2.1 夹具设计阶段
夹具设计阶段是设计气路的第一阶段。夹具设计初期应根据夹具情况预先选择管线材料。并且气管管径过小会节流,因此限制气缸的速度;而管径过大会造成滞流,因此增加空气消耗量和填充时间。

图2 焊接系统示意
夹具设计阶段在考虑夹具机械结构设计的同时,应为气路设计预留出走线孔,规划线槽,考虑电磁阀集装板及控制模块安装空间,及是否超过变位机各回转半径。
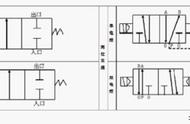
2.2 气路设计阶段
气路设计的原则是让气路中的执行装置定位夹紧可靠,按照一定的顺序松开、夹紧并确保安全。