门座起重机是具有沿地面轨道运行,下方可通过铁路车辆或其他地面车辆的门形座架的可回转臂架型起重机。结构部分包括门架、人字架、旋转平台、司机室、臂架系统(臂架、拉杆、象鼻梁)等。机构部分包括起升机构、变幅机构、旋转机构、运行机构。电气部分一般通过电缆卷筒或地沟滑线供电,采用电力直接驱动;一般包括电线电缆、中心集电器、电动机、变压器、电阻器、控制柜、操纵台、照明等。安全装置部分包括限位装置、超载限制器、缓冲器、防风搞滑装置等。附属装置司机室、机房平台的高度超过20m的大型门座起重机则应当考虑安装附属的简易电梯。如图所示,这类起重机配备有可以更换的吊钩、抓斗等吊具如图所示,这类起重机在门座上装有漏斗和带式输送机,用抓斗卸船的门座起重机。重机,用于船厂的吊装工作,具有较大的起重能力和较大的起升高度。通常备有两个或多个起重吊钩。主钩的起重量应能随工作幅度的变化而变化。工作速度一般比港口用的门座起重机用于电站建设的门座起重机,具有较大的工作幅度和起重能力,且易于拆卸和拼装,便于转移工地。门架结构支承着上部旋转部分的全部自重和所有外载荷。门架结构对整个起重机的稳定性和减轻自重有着重要意义。为保证起重机正常平稳运转,门架必须有足够的强度,尤其是要有较大的刚度。如图7-4所示。这种门架是由两片平面刚架交叉组成的空间结构。它的顶面为一大圆环,其上装有环形轨道和大齿轮。门架当中有一个十字横梁,在横梁的交叉处装有转柱下支承的球铰轴承。在起重机轨道的同侧平面内,用拉杆把两条门腿相连在一起,以增加门架的空间刚度。如图7-5所示。它的顶部是一个圆环结构,其上装有环形轨道和大齿轮。圆环断面常作成箱形的或宽腹板的工字形断面。在圆环下成的对称的空间桁架结构。这类起重机的上部旋转部分,通过大型滚柱轴承式旋转支承装置直接支承在门架上。这样,上部旋转部分的垂直力、水平力和倾覆力矩通过大轴承全部传给门架顶部,从而使门架受力状况得到改善,并简化了门架结构的构造。如高圆筒形的门架(图7-6)。这种门架的圆筒高度比门腿结构的高度还高些。•2.大轴承式门架结构(新型)为了支承臂架,一般都没有人字架。变幅机构的推杆,组合臂架的拉杆及其对重杠杆等都与人字架相连。人字架支承在旋转平台目前广泛使用的旋转平台和转柱结构如图7-8所示。平台的金属结构由两根纵向主梁及一些横梁和平板组成。根据受力大小,这些梁可做成箱形断面或工字形断面,臂架和人字架都支承在平台上。还有起升机构和旋转机构等机电设备,都安放在平台上。旋转平台和转柱相连接。臂架的两个下支承转柱常被作成棱锥形薄壁箱形结构,刚度大,自重轻。臂架系统是门座起重机把货载传递到旋转平台的主要构件,可以做成单臂架系统或组合臂架系统。刚性传动变幅的单臂架门座起重机的特点,是整个臂架系统只有臂架这一刚性部件。由于装有臂架自重平衡系统和刚性传动装置,因而变幅拉点布置在靠近臂架根部,依靠螺杆、螺丝传动实现臂架俯仰。为了减轻自重,这种单臂架大多采用高强度管子制成三角形截面或矩形截面的大杆桁架结构,也有直接用大管子或钢板焊成实体结构的。它没有臂架平衡装置,变幅钢丝绳固定于臂架头部,依靠柔性拉索的收进与放出实现臂架的俯仰。门座起重机的四连杆臂架系统,是组合式起重臂架的一种典型形式。一是有效空间较小,影响使用;二是悬挂钢丝绳过长,不利于装卸作业;三是为了实现水平变幅需要借助钢丝绳进行补偿。如图7-9所示,它是采用钢丝绳作为拉杆,并借助象鼻架尾部一定几何尺寸形状的曲线,实现变幅过程中货物的水平移动。刚性拉杆式组合臂架,是由象鼻架、刚性拉杆及臂架三部分通过铰轴组合而成,并与机架拼成四连杆机构,以实现变幅过程中货物的水平移动。图7-10为港口用小型门座起重机的象鼻架的构造图。它由底面的一根箱型主梁和其上的两片撑杆系统组成。它是由两片工字型单腹板梁借助横向隔板连接而成的空间板梁结构。造船用门座起重机常采用这种结构型式。这种结构型式与桁构式象鼻架不同,是一个空间的刚架体系。这种型式的转盘式门座起重机中曾普遍采用过,但由于不能适应自动焊接,制造困难,费时,油漆及维护表面较多,因而已很少采用。臂架是支承象鼻架的主要构件。图7-11为箱型截面实体式臂架的构造图。臂架的另一种型式拉杆是一根上端与象鼻架尾部相铰接,下端与人字架顶部铰接的刚必瑷拉杆件。一般多采用箱型结构。门座起重机的起升机构由驱动装置、制动装置、传动装置、卷绕系统等组成。其起升卷绕系统如图7-13所示门座起重机的变幅机构分为非工作性变幅与工作性变幅两种。起重机只允许在空载情况下改变幅度为非工作性变幅,只是在调整起重机臂架工作拉置时才变幅,而在装卸、起吊货物时幅度是不变的。起重机能在带载情况下改变幅度(每一工作循环中都要变幅)为工作性变幅。目前普遍采用载重水平位移和臂架自重平衡两种措施。图7-14为利用补偿滑轮组使物品水平变幅的工作原理图。如图7-16所示d.椭圆规原理补偿法e.连杆-滑轮组补偿法组合臂架系统的主要补偿方法如图7-9所示,组合臂架的象鼻架有一部分是曲线段,与拉索联合使象鼻架端部作水平运动。如图7-19所示,臂架的象鼻架为直线型与刚性拉杆,臂架及人字架一起构成一个平面四杆机构。则在相当于有效幅度的ab线段内,该曲线可以接近于一根水平线。如图7-20所示,组合臂架的纵向中心线与大拉杆的轴心线相互平行,象鼻架中心线与小拉杆轴心线相平行。图7-21所示为得用尾重法来获得臂架平衡的工作原理。如图7-22所示,得用杠杆系统,使臂架与对重的合成质心沿近似水平线移动,使臂架系统得到近似平衡。2.变幅驱动机构变幅驱动机构有绳索滑轮组、曲柄连杆、扇形齿轮、齿条、螺杆、液压缸等形式。(1)绳索滑轮组变幅驱动机构如图7-16所示,(2)曲柄连杆变幅机构如图7-24所示,曲柄连杆驱动对重杠杆,然后再通过杠杆臂架摆动。(3)扇形齿轮变幅驱动机构如图7-25所示,当臂架采用尾重法来平衡时,扇形齿轮常直接装设在臂架尾部,这时扇形齿轮本身可以兼作部分对重之用。(4)齿条变幅驱动机构如图7-26所示,臂架直接由齿条推动。5)螺杆变幅驱动机构图7-27所示,螺杆螺纹的头数可以是单头、双如图7-29所示,支承装置通常是四支点的,每个支点下可装单个滚轮或双轮台车。它是转盘式支承装置中承载能力最小的一种,主要用于小起重量的起重机。如图7-30所示为该支承装置的构造简图。它是将圆锥或圆柱滚子装在上下两个环形轨道之间,滚子通过心轴组装在隔离夹套的内外环之间。如图7-31所示,该装置中的滚球或滚柱可以选用一般滚动轴承中标准规格和尺寸的滚动体。起重机的旋转部分固定在大轴承的旋转座圈上,而大轴承的固定座圈则与门架顶面相固结图7-32a是卧式电动机、圆柱和圆锥齿轮传动。这种方案的优点是可采用标准减速器,传动效率高。缺点是平面布置尺寸大,机械安装要求图7-32b是卧式电动机与蜗轮减速器传动。其优点是工作平稳,结构紧凑,传动比大,但传 动效率低。 图7-32c是立式电动机的轴线竖直布置的立式减速器传动。这种方案的优点是平面尺寸紧凑, 传动效率最高,是一种较理想的传动方案。 图7-32d是立式电动机和行星减速器传动。这些传动的结构都很紧凑,传动比大,是很有发 展前途的传动型式。 运行机构的组成可以分为运行支承装置、运行驱动装置和运行安全装置三部分。运 行支承装置包括均衡梁、车轮、销轴等。 运行驱动装置包括电动机、制动器、减速 装置等。运行安全装置包括夹轨器、防止 起重机碰撞的缓冲器及运行限位器等。
,
鹤式起重机的使用方法(鹤式起重机使用视频)
阅读全文>>2024-02-01 21:54:25

门座式起重机有四大工作机构(门座式起重机基本结构组成)
阅读全文>>2024-02-01 21:52:30
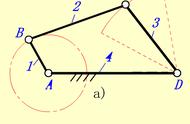
鹤式起重机平面机构简图(起重机结构图讲解)
阅读全文>>2024-02-01 22:03:11
鹤式起重机和港口起重机一样吗(鹤式起重机结构分析)
阅读全文>>2024-02-01 21:49:29

鹤式起重机是什么机构(门座式起重机各部位名称)
阅读全文>>2024-02-01 21:45:36
鹤式起重机实际构造(鹤式起重机机构动画)
阅读全文>>2024-02-01 21:57:31

门座式起重机包括哪些(门座起重机和门式起重机区别图)
阅读全文>>2024-02-01 22:01:06

鹤式起重机的结构自由度(鹤式起重机结构分析)
阅读全文>>2024-02-01 21:39:43

鹤式起重机设计问题(鹤式起重机结构分析)
阅读全文>>2024-02-01 22:09:12
鹤式起重机课程设计说明书(桥式起重机结构设计说明书)
阅读全文>>2024-02-01 22:21:50





