一、实验目的
1、掌握步进电机的工作原理
2、掌握带驱动电源的步进电机的控制方法
3、掌握DECO指令实现步进电机正反转和调速控制的程序
二、实训仪器和设备
1、FX2N-48MR PLC一台
2、两相四拍带驱动电源的步进电机一套
3、正反切换开关、起停开关、增减速开关各一个
三、步进电机工作原理
步进电机是纯粹的数字控制电动机,它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就转动一个角度,图3-1是一个三相反应式步进电机结图。从图中可以看出,它分成转子和定子两部分。定子是由硅钢片叠成,定子上有六个磁极(大极),每两个相对的磁极(N、S极)组成一对。共有3对。每对磁极都绕有同一绕组,也即形成1相,这样三对磁极有3个绕组,形成三相。可以得出,三相步进电机有3对磁极、3相绕组;四相步进电机有4对磁极、四相绕组,依此类推。
反应式步进电动机的动力来自于电磁力。在电磁力的作用下,转子被强行推动到最大磁导率(或者最小磁阻)的位置,如图3-1(a)所示,定子小齿与转子小齿对齐的位置,并处于平衡状态。对三相异步电动机来说,当某一相的磁极处于最大导磁位置时,另外两相相必处于非最大导磁位置,如图3-1(b)所示,即定子小齿与转子小齿不对齐的位置。

把定子小齿与转子小齿对齐的状态称为对齿,把定子小齿与转子小齿不对齐的状态称为错齿。错齿的存在是步进电机能够旋转的前提条件,所以,在步进电机的结构中必须保证有错齿的存在,也就是说,当某一相处于对齿状态时,其它绕组必须处于错齿状态。
本实验的电机采用两相混合式步进电机,其内部上下是两个磁铁,中间是线圈,通了直流电以后,就成了电磁铁,被上下的磁铁吸引后就产生了偏转。因为中间连接的,是采用在转轴的位置用一根滑动的接触片。这样如果电磁铁转过了头,原先连接电磁铁的两根线刚好就相反了,所以电磁铁的N极S极就和以前相反了。但是电机上下的磁铁是不变的,所以又可以继续吸引中间的电磁铁。当电磁铁继续转,由于惯性又转过了头,所以电极又相反了。重复上述过程就步进电机转了。
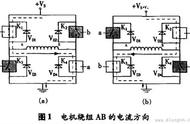
根据这个原理,如图3-2所示,两相步进电机的转动步骤,以正转为例:

由图可见,现相异步电机正转过程分为四个步骤,即A相正方向电流、B相正方向电流、A向反方向电流和B相反方向电流。反转工作的顺序与之相反。A、B两相线圈不是固定的电流方向,这与其它步进电机的控制逻辑有所不同。因此,控制步进电机转动时,必须考虑用换相的思路设计实验线路。可以根据模拟驱动电路的功能和plc必须的逻辑关系进行程序设计。
四、采用步进电机驱动器的控制方式
利用步进电机驱动器可以通过PLC的高速输出信号控制步进电机的运动方向、运行速度、运行步数等状态。其中:步进电机的方向控制,只需要通过控制U/D端的On和Off就能决定电机的正转或反转;将光耦隔离的脉冲信号输入到CP端就能决定步进电机的速度和步数;控制FREE信号就能使电机处于自由状态。
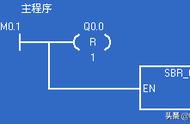
因此PLC的控制程序相当简单,只需通过PLC的输出就能控制步进电机的方向、转速和步数。不必通过PLC控制电机换相的逻辑关系,也不必另外添加驱动电路。实训面板见图3-4,梯形图见图3-5。本程序是利用D0的变化,改变T0的定时间隔,从而改变步进电机的转速。通过两个触点比较指令使得D0只能在10~50之间变化,从而控制步进间隔是1S~5S之间,I/O分配表见表3-1。
表3-1 I/O分配表