摘 要 本文结合作者维修汽车四轮定位设备的经验,对四轮定位设备的原理、工艺及汽车跑偏现象的形成机制进行了比较详尽的分析。
文章不但从控制理论,还从工艺原理、生产实践中列举了大量的依据,论证车辆跑偏的深层原因及其防范方法。
该文对四轮定位设备的维修及车辆检测有一定指导意义。
关键词 四轮定位 连续跑偏 前束 外倾 防范措施
1马自达6批量路试跑偏质量问题
我厂现在的主要产品是MAZDA6,该产品目前在我厂已经形成日产250辆份的批量,并以优良的质量优势逐步获得市场的认同。
但是该产品投产的前期,在设备部门坚持周期性标定控制的前提下,曾经无规律地偶发零星批量车辆路试跑偏质量问题,但经过设备重复性标定的方法基本可以解决。
到2002年10月,突然发生大批量车辆路试方向性不合格质量问题。问题反映为整车路试跑偏,或者方向盘偏。严重时,8天统计累计达到400多辆,约占当时产量的50%。而且经过常规标定无法彻底恢复。
由于该问题直接关联到检测线的四轮定位仪及产品自身问题,因此,以设备、工艺部门为主,进行了连续多天,上千辆份的跟踪测试、记录,最终得出一系列有效的控制方法,从而使车辆跑偏的质量问题得以解决。
2四轮定位仪的任务及工作流程
要了解该质量问题的症结,必须彻底了解四轮定位设备的工作原理及工作流程。同时也要了解产品工艺方面的相关信息。
2.1四轮定位仪的任务
四轮定位仪是一种整车方向性检测调整设备,通过四轮定位仪调整后的车辆在行驶时,车辆行走轨迹在一定范围内应保持直线,不应出现跑偏现象,这将关系到车辆行驶,特别是高速行驶的安全性,因此是整车装配的关键质量环节。
四轮定位仪一般可以对以下项目进行检测调整:
(1)前束。
(2)外倾。
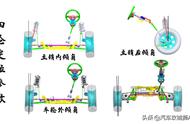
(3)主销内倾角。
(4)最大转向角。
(5)推力角。
目前,我们的设备主要测试前后轮的前束、外倾,并计算推进角;同时,还校正方向盘。
2.2四轮定位仪工作流程
在测试台全部原位的情况下,将被测车辆行驶到四轮定位仪上。整个测试流程为:
扫码――过渡板收回――轴距调整――按启动按钮――车轮旋转――对中――浮动板释放――安装方向盘――地坑内操作者进行四轮调整――调整合格――测试结束――车轮停止――浮动板锁定――对中退回――过渡板伸出――打印测试结果――车辆下线
整个工作流程的主要环节解释如下:
(1)扫码:通过扫码可以确定车辆出厂号并将测试结果打印,同时送入数据库,作为车辆质保凭证。另一个作用是通过扫码,确定车型以改变设备轴距及激光传感器位置(四轮定位仪可适合多种车型混流生产)。
(2)过渡板收回:使四个车轮完全与辊子接触,目的是让辊子带动车轮旋转。
(3)对中:对中装置从外侧扶正车轮,对中合理压力为50公斤左右。
(4)轴距调整:根据车型自动变换轴距,即使前后辊子中心距和被测车辆车轮中心距相吻合。
(5)车轮旋转:电机拖动辊子带动车轮旋转。
(6)浮盘释放:车轮下面支撑的浮动板释放,使车身处于自由浮动状态。
(7)安装方向盘规:安装方向盘规,校正方向盘,把车轮摆正。
(8)四轮调整:根据屏幕显示的前束、外倾值手工调整轮胎位置。
(9)测试结束:操作者将前束、外倾值调整到工艺要求范围内,结束操作。
3四轮定位仪测试原理分析
3.1四轮定位仪的基本测量结构
四轮定位的精度主要取决于测试方法和测试结构,且二者有密切的关联。我们的设备使用的是三传感器非接触式测量。
所谓三传感器形式,是指用三个传感器进行测量。三个传感器成品字形布置,分别处于9点、12点、3点钟位置。3点、9点传感器用来测量X方向的轮胎位置数据,上面的12点传感器和底下两个的中点连线,用来测量轮胎Y方向的位置数据。
为平均误差,每个位置的距离实际上是采集许多个激光点的反射距离来平均确认的。
下图是一个激光头发射激光的局部示意图。

图1:激光测量装置
前束和外倾的计算是利用每个轮胎测试的三个点形成的平面倾角来计算的。车轮前后中心径线和车辆前后中轴线的夹角称为前束,车轮上下中心径线和地面垂线的夹角称为外倾。
3.2四轮定位的控制结构
测量的距离信号通过模数转换板进入到计算机系统,经过数学分析计算出前束、外倾值。
三个激光传感器组成一个测量树。这样的的激光树有四个,分别用于测量四个轮胎。系统整体控制结构如下:

图2:激光测量系统控制结构
四个车轮计算后的前束、外倾值动态显示在屏幕上,作为操作工人调整的目视依据。
3.3四轮定位算法过程
四轮定位基本算法采用如下步骤:
(1)测取车轮轮胎轮廓线
激光系统通过发射激光及接收激光的方式,测量车轮轮廓。通过连续的光束,读取并用计算机模拟出车轮轮胎轮廓。
这个轮廓包括车轮边沿及车轮本身的毛刺、字迹等“扰动”成分,是必须处理的。

图3:第一次测试后的模拟轮胎轮廓曲线
(2)提取高点附近的计算区段
厂家提出两种算法:
1) 轮胎壁过滤算法——经过过滤平滑处理,以消除轮胎变形、毛刺及字母影响。
2) 轮胎边缘跳动补偿——去掉轮胎边缘及周期性的跳动。
经过以上处理,提取高点附近的一个区段的十几个点的数据,进行后续运算。