在科学探索及紧急抢险中经常要对一些危险或人类不能直接到达的地域进行探测,这就需要用机器人来完成。而机器人在复杂地形行进时自动避障是一项必不可少也是最基本的功能。避障功能在日常生活中也是比较常见的,像是风靡一时的自动清扫机器人,只需放在地上一会就可以将你的屋子打扫干净,这里面的最基本功能也是避障,当它检测到前方有障碍就会绕开。这样就可以躲避家具将你的地板清理干净了。因此,自动避障系统的研发就应运而生。

MCS-51《单片机原理及接口技术》是中职院校电气自动化专业开设的 一门必修课程,该课程主要是通过对单片机的内部结构、相关外围电路及编程语言的学习,使学生掌握用单片机进行开发设计一些实用电子电路的能力,自动避障小车就是基于这一系统开发而成的。自动避障小车可以作为地域探索机器人和紧急抢险机器人的运动系统,让机器人在行进中自动避过障碍物。
一、本设计任务和主要内容本设计是对以单片机STC89C52RC为核心的系统根据感测模块传输的前方路面信息,控制小车行驶走向的软、硬件设计开发。系统要能够做到准确及时监测前方路面信息并传输给主控模块,做到根据前方路面信息及时调整小车的走向,做到显示小车的走向和小车已经行驶过的路程。
壁障小车的主要功能是:
① 感测模块实时监测路面情况并及时将障碍物的位置传输给单片机;
② 单片机核心模块根据感测模块给予的信息控制小车两电机转动;
③ 电机驱动模块驱动两电机转动,实现转向与行走。
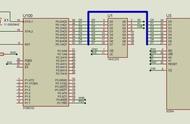
二、系统主要硬件电路设计根据设计要求,我们的自动避障小车主要由五个模块构成:车体框架、电源及稳压模块、主控模块、探测模块、电机驱动模块组成。 各模块分述如下:

图1 系统模块组成框图
2.1 小车避障原理分析
小车车头处装有三个红外探头,中间一个光电开关对向正前方,两侧的红外探头向两边各分开30度,(如图2所示)。小车在行进过程中由红外探头向前方发射出红外线,当红外线遇到障碍物时发生漫反射,反射光被光电开关接收。小车根据三个探头接受信号的情况来判断前方障碍物的分布并做出相应的动作。