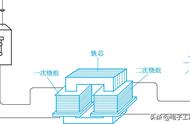
电感式接近传感器工作原理图
除工业应用外,电感式接近传感器也常用于通过改变路口和十字路口的交通信号灯来控制交通流量。矩形电感线圈埋入柏油路面。
当汽车或其他道路车辆经过此感应回路时,车辆的金属车身会改变回路电感并激活传感器,从而提醒交通信号灯控制器有车辆在等待。
这些类型的位置传感器的一个主要缺点是它们是“全向的”,即它们会感应金属物体的上方、下方或侧面。此外,尽管电容式接近传感器和超声波接近传感器可用,但它们不能检测非金属物体。其他常用的磁性位置传感器包括:簧片开关、霍尔效应传感器和可变磁阻传感器。
二、电容式位置传感器
电容式位置传感器依靠检测电容值的变化来确定被测物体的位置。电容由彼此分开的两块板组成,两块板之间有介电材料。
电容式位置传感器检测物体的位置有两种方法:
1、通过改变电容器的介电常数
2、通过改变电容器极板的重叠面积
在第一种情况下,被测物体附着在介电材料上,其相对于电容板的位置随着物体的移动而变化。随着介电材料的移动,电容器的有效介电常数发生变化,这是由于部分区域的介电材料和其余部分是空气的介电常数的结果。这种方法提供了电容值相对于物体相对位置的线性变化。
在第二种情况下,不是将物体连接到介电材料上,而是连接到电容板上。因此,当物体移动其位置时,电容极板的重叠区域会发生变化,从而再次改变电容值。
改变电容以测量物体位置的原理可以应用于线性和角度方向的运动。
三、电位位置传感器
所有“位置传感器”中最常用的是电位器,因为它是一种便宜且易于使用的位置传感器。它有一个与机械轴相连的触点,该机械轴的运动可以是有角度的(旋转的)或线性的(滑块型),这会导致滑块和两个端部连接之间的电阻值发生变化,从而产生电信号输出在电阻轨道上的实际抽头位置与其电阻值之间具有比例关系。换句话说,阻力与位置成正比。

电位器实物图
电位器有多种设计和尺寸,例如常用的圆形旋转类型或较长且扁平的线性滑块类型。当用作位置传感器时,可移动物体直接连接到电位计的旋转轴或滑块。
直流参考电压施加在形成电阻元件的两个外部固定连接上。输出电压信号取自滑动触点的抽头端子,如下图所示。
电位器结构图

电位器结构图
这种配置产生与轴位置成比例的电位或分压器类型的电路输出。然后,例如,如果在电位器的电阻元件上施加 10v 的电压,则最大输出电压将等于 10 伏的电源电压,最小输出电压等于 0 伏。
然后电位器抽头将输出信号在 0 到 10 伏之间变化,其中 5 伏表示抽头或滑块处于其中间位置或中心位置。电位器的输出信号 (Vout) 在沿电阻轨道移动时取自中心游标连接,并且与轴的角位置成正比。
简单的位置检测电路示例

简单的位置检测电路示例
虽然电阻式电位器位置传感器具有许多优点:成本低、技术含量低、易于使用等,但作为位置传感器,它们也有许多缺点:运动部件磨损、精度低、可重复性低和频率响应有限。
但是将电位计用作位置传感器有一个主要缺点。其游标或滑块的移动范围(以及因此获得的输出信号)受限于所使用的电位器的物理尺寸。
例如,单圈旋转电位器通常仅具有在 0° 和最大约 240 至 330° 之间的固定机械旋转。但是,也可提供机械旋转高达 3600 o (10 x 360° ) 的多圈锅。
大多数类型的电位器都使用碳膜作为电阻轨道,但这些类型的电位器具有电噪声(收音机音量控制上的噼啪声),并且机械寿命也很短。
四、基于涡流的位置传感器
涡流是在磁场变化的情况下发生在导电材料中的感应电流,是法拉第感应定律的结果。这些电流在闭合回路中流动,进而导致产生次级磁场。
如果线圈通过交流电通电以产生初级磁场,则由于涡流产生的次级场的相互作用,可以感应到靠近线圈的导电材料的存在,这会影响线圈的阻抗线圈。因此,线圈阻抗的变化可以用来确定物体与线圈的距离。
涡流位置传感器与导电物体一起工作。大多数涡流传感器用作接近传感器,旨在确定物体是否接近传感器的位置。它们被限制为位置传感器。
因为位置传感器是全向的,这意味着它们可以确定物体与传感器的相对距离,但不能确定物体相对于传感器的方向。
五、磁致伸缩位置传感器
铁、镍和钴等铁磁材料表现出一种称为磁致伸缩的特性。磁致伸缩位置传感器利用当存在外加磁场时,材料会改变其尺寸或形状这一原理来确定物体的位置。
一个可移动的位置磁铁附在被测物体上。波导由传输电流脉冲的导线组成,连接到位于波导末端的传感器。定位磁铁产生轴向磁场,其磁力线与磁致伸缩线和波导共面。当电流脉冲沿波导向下发送时,导线中会产生一个磁场,该磁场与永磁体(位置磁体)的轴向磁场相互作用。
场相互作用的结果是一种扭曲,称为维德曼效应。这种扭曲会导致导线产生应变,从而产生沿着波导传播并由波导末端的传感器检测到的声脉冲。
由于声波将从定位磁铁所在的位置沿两个方向传播,因此在波导的另一端安装了一个阻尼装置,以吸收远离传感器传播的脉冲。传感器,使其不会导致干扰信号反射回拾取传感器。下面的图 2 说明了磁致伸缩位置传感器的工作原理。