项目设计中,经常涉及到点对点的搬运控制,在多位置、重复性及稳定性考虑一般会选择伺服马达作为驱动的动力,使用伺服电机就涉及到定位参考点,在控制上我们通常称为一套伺服系统为一个定位轴。
对于定位轴,在进行绝对定位时,轴的坐标零点必须是已知的,轴的零点标定与电动机的位置反馈所使用的编码器类型相关。
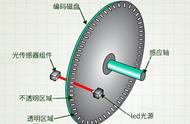
电动机轴上的编码器通常可分为绝对值编码器及增量编码器两种类型。
1、对于绝对值编码器,仅需要进行一次绝对值编码器的零点校正即可;
2、对于增量编码器,由于位置无法保持,因此每次设备上电后,必须通过执行主动回零运动来确定轴的机械零点坐标。
介绍3种常用回零方法:
1. 通过V-ASSISTANT软件设置
- 设置电机当前位置对应的参考点位置坐标值,默认为0
- 点击设置回参考点按钮
- 执行保存参数到ROM

2. 通过BOP面板设置
可通过 BOP 功能菜单 "ABS"设置绝对值编码器的当前位置至零位。校准位置值在参数 p2599 中设置。设置零位后必须保存参数。
要完成此任务,按下 图操作:

3、TO工艺对象回零
工艺对轴轴回零使用命令"MC_Home"即可,增量编码器主动回零选择"Mode"=3,绝对值编码器校准选择"Mode"=7。
通常情况,绝对值编码器伺服电机,安装好负载后只需要校对一次零点即可。但是由于联轴器或负载位置的改变造成机械位置的变化,这时就必须再次校对原点位置,其他位移位置随之改变。
,