什么是点云?
点云是目标表面特性的海量点集合,点云越密集,反映的图像细节和信息就越多。
当我们利用三维激光扫描仪扫描某一建筑表面时,我们可以得到大量密集的点,这些点带有三维坐标(XYZ)、激光反射强度和和颜色信息(RGB)等信息,它们共同创建了可识别的三维结构。

创建和利用点云是从另一种角度认识数据世界的方式,当我们想要利用点云去实现目标,我们必须知道如何获得点云数据,并从中取得最大的价值。下面,我们一起来了解下点云的获取和处理方式。
如何创建点云?目前,点云的获取方式一般是通过三维激光扫描仪,三维激光扫描仪通过扫描选定的目标物体或环境后,能大面积高分辨率地快速获取被测对象表面的三维坐标数据。
下面,我们以Trimble三维激光扫描仪为例,一起来看下点云数据的具体创建过程。
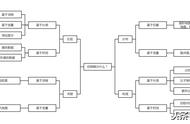
Trimble三维激光扫描仪主要扫描过程和技术流程如下:

Trimble三维激光扫描仪最终采集的数据以点云和图像的形式储存在扫描仪设备里,运用Trimble RealWorks进行一定处理后,能获取建筑物的相对位置信息、尺寸、纹理和形状,进而建立真实的物体数据模型。

在三维激光扫描的过程中,点云数据的获取常常会受到物体遮挡、光照不均匀等因素的影响,容易造成复杂形状物体的区域扫描盲点,形成孔洞。同时由于扫描测量范围有限,对于大尺寸物体或者大范围场景,不能一次性进行完整测量,必须多次扫描测量,因此扫描结果往往是多块具有不同坐标系统且存在噪声的点云数据,不能够完全满足人们对数字化模型真实度和实时性的要求,所以需要对三维点云数据进行去噪、简化、配准以及补洞等预处理。