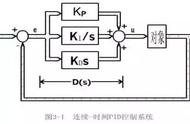
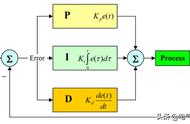
第一节 基本控制规律及其作用效果
在工业生产过程控制中,常用的基本调节规律大致可分为:
1 位式调节
也就是常说的开/关式调节,它的动作规律是当被控变量偏离给定值时,调节器的输出不是最大就是最小,从而使执行器全开或全关。在实际应用中,常用于机组油箱恒温控制、水塔以及一些储罐的液位控制等。在实施时,只要选用带上、下限接点的检测仪表、位式调节器或PLC、再配一些继电器、电磁阀、执行器、磁力起动器等即可构成位式控制系统。因此,位式控制的过渡过程必然是一个持续振荡的过程。如图0所示。

图0 位式控制的过渡过程
2 比例调节
它依据“偏差的大小”来动作。它的输出与输入偏差的大小成比例,调节及时,有力,但是有余差。用比例度δ来表示其作用的强弱,用%表示。例如比例度60%,即表示当偏差为量程的60%时,输出变化值为量程的100%。δ越小,调节作用越强,调节作用太强时,会引起振荡。比例调节作用适用于负荷变化小,对象纯滞后不大,时间常数较大而又允许有余差的控制系统中,常用于塔和储罐的液位控制以及一些要求不高的压力控制中。使用时应注意,当负荷变化幅度较大时,为了平衡负荷变化所需的调节阀开度变化也将较大,待稳定后,被控变量的余差就可能较大。比例控制规律的动态方程为:

3 积分调节
它依据“偏差是否存在”来动作。它的输出与偏差对时间的积分成比例,只有当余差完全消失,积分作用才停止。其实质就是消除余差。但积分作用使最大动偏差增大,延长了调节时间。用积分时间Ti表示其作用的强弱,单位用分(或秒)表示。Ti越小,积分作用越强,积分作用太强时,也会引起振荡。积分控制规律的动态方程为:

4 微分调节
它依据“偏差变化速度”来动作。它的输出与输入偏差变化的速度成比例,其实质和效果是阻止被调参数的一切变化,有超前调节的作用。对滞后较大的对象有很好的效果。使调节过程动偏差减少,余差也减少(但不能消除)。用微分时间Td表示作用的强弱,单位用分(或秒)表示。Td大,作用强,Td太大,会引起振荡。微分控制规律的动态方程为: