第二节 实用的控制规律
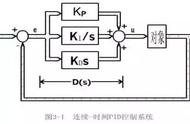
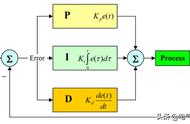
由于位式调节及易引起振荡,所以除特定场合外,一般应用较少,使用较多的是比例、积分、微分调节作用。但实际上单纯使用比例、积分、微分作用的场合也较少,最多使用的是三种调节规律的组合。组合后的调节规律由图1所示,PID三作用调节质量最好、PI次之,积分最差因此很少单用。其中:


图1 各种调节规律比较
1—比例微分作用;2—比例积分微分作用;3—比例作用;
4—比例积分作用;5—积分作用;
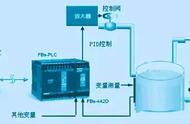
第三节 PID参数的工程整定方法
调节器参数的整定,是自动调节系统中相当重要的一个问题。在调节方案已经确定,仪表及调节阀等已经选定并已装好之后,调节对象的特性也就确定了,调节系统的品质就主要决定于调节器参数的整定。因此,调节器参数整定的任务,就是对已选定的调节系统,求得最好的调节质量时调节器的参数值,即所谓求取调节器的最佳值,具体讲就是确定最合适的比例度、积分时间和微分时间。
把参数整定工作放在怎样的位置,存在两种片面的看法:
一种看法是过分强调了参数整定的作用,把调节器参数整定看作自动化理论的核心,这当然是错误的。因为调节器参数只能在一定范围内起作用,如果方案不合理,工况改变、或属于仪表和调节阀故障,则不论怎样去调整比例度,积分时间和微分时间,仍然达不到预定的调节质量要求。同时,调节器参数在目前很难单纯依靠计算的方法来求取,因为计算法要遇到两个很大的困难,一是缺乏足够的对象动态特性资料,实验测试也不容易,二是计算方法繁琐,工作量大,而且对象往往有非线性或改变工艺参数的情况,所以化了不少力气算出来的结果仍不可靠。
另一种看法是过分地贬低参数整定的作用,我们会遇到三类不同的系统情况。第一类是较容易调节的系统:比例度、积分时间和微分时间可以放在很宽的范围,调节质量都能满足。第二类是方案选择不当的系统,不论怎样去整定参数,系统仍不能良好的运行。如果只看到以上两种情况,是会产生不必重视调节器参数整定的错觉。实际上有相当多数量的系统介于这两种极端情况之间,这可以说是第三类的系统,它们在整定参数选择得当的时候,可以运行得很好,反之,在整定参数不合适时,调节质量就达不到要求。我们不要将它们与第二类系统混同起来,错当成不能投入自动的系统。另外,对第一类系统来说也有使调节质量进一步完善的要求。
因此,我们应当重视调节器参数整定的工作,而不要片面地看问题。
参数整定的方法很多,我们只介绍几种工程上最常用的方法。
1 临界比例度法
这是目前使用较广的一种方法,具体作法如下:
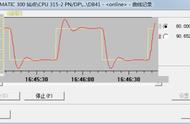
先在纯比例作用下(把积分时间放到最大,微分时间放到零),在闭合的调节系统中,从大到小地逐渐地改变调节器的比例度,就会得到一个临界振荡过程,如图2所示。这时的比例度叫临界比例度δk,周期为临界振荡周期Tk。记下δk和Tk,然后按表1的经验公式来确定调节器的各参数值。

图2 临界振荡示意图