Setup Robot System Variables参数设置
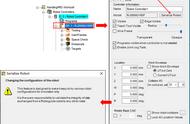
2.在弹出的参数设置界面中,MOUNT ANGLE SETTING参数设置为180(即倒挂安装方式),点击ENTER按钮。其他参数均保持默认。

MOUNT ANGLE SETTING参数设置界面
3.参数全部设置完成后,返回“Setup Robot System Variables”界面,然后依次点击“FCTN”→“1 START (COLD)”,点击ENTER按钮,等待系统冷启动完成。
四、测试运行系统冷启动完成后,打开虚拟示教器,将机器人坐标系切换到“TOOL”或“WORLD”,然后对其进行手动操作,机器人就能够正常运行了。

正常运行的机器人
注:当机器人在墙面上安装时,可以设置MOUNT ANGLE SETTING参数为90,其他安装角度可以根据安装情况在-180°~180°之间进行自定义,设置角度正负值如下图所示。

机器人安装设置角度
The End
上一篇: