对话框中各个功能选项含义如下:
Workcell Object to Generate:选择要在工作站中生成的对象,包含几何特征(Feature)或目标点(Target),两个选项只能选择其一。选择“Create Target Group”后,目标点坐标数据导入后将自动创建目标组(Target Group),并将目标点添加到目标组中。选择“Visible”后,目标点坐标数据导入后,软件工作区会显示目标点坐标系。
Target Name:设置即将生成的目标点的名称前缀。
Data File:显示要导入的目标点坐标数据文件目录与文件名称,点击后方的“打开文件”按钮,可以选择新文件或更换已有文件。
X,Y,Z,W,P,R:当目标点坐标数据以位置和角度的形式表示时,点选此选项。
X,Y,Z, Normal X, Normal Y, Normal Z:当目标点坐标数据以点向量坐标形式表示时,点选此选项。
在Data File后方点击“打开文件”按钮,选择要导入的目标点坐标数据文件,文件一般为CSV格式,其他选项保持默认,点击“OK”按钮。

此时,左侧Cell Browser浏览树中目标点“Targets”下出现导入的目标点文件,并且目标点名称以“T”为前缀,后缀序号从1开始依次递增1个单位。

同时,软件工作区也出现黄色的目标点坐标系模型,目标点坐标数据成功导入。

由于工装夹具、焊接板件、焊点坐标数据都是以同一个坐标系为参考对象设计出来的,而将它们导入ROBOGUIDE软件后,模型的设计参考坐标系会自动与ROBOGUIDE软件的世界坐标系重合。因此,在导入成套的外部模型时,只要按照一定的流程进行导入与安装,那么工装夹具、焊接板件以及焊点坐标数据就能实现自动装配,而无需再进行手动调整。
外部模型导入与安装流程:导入工装夹具→修改工装夹具位姿属性为零→导入焊接板件→焊接板件安装到工装夹具→导入焊点坐标数据文件(目标点)→焊点坐标数据安装到焊接板件。
按照上述流程将工装夹具、焊接板件、焊点坐标数据相互安装之后,当移动工装夹具模型时,焊接板件、焊点坐标数据都会随着工装夹具同步移动,这就为调整机器人工作站的布局带来了极大的方便。
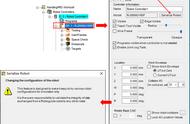
焊点坐标数据安装到焊接板件的操作也非常简单,在左侧Cell Browser浏览树中双击导入的目标文件,弹出目标点属性对话框。
在对话框的“General”选项卡中,点击Appearance属性区域下Attached后的下拉框,在下拉菜单中选择“工件在工装夹具上”,如下图所示,即将目标点(焊点坐标数据)安装到工件上。