LabVIEW2017
视频传送门文件变更
日期:2019.12.25
章节:起草
变更描述:起草文档
作者姓名:基德的嘲笑
练习1-1 二维系列机器人动画 VI
对象: 打开并运行一个VI
1. 选择“开始”>> National Instruments>>LabVIEW2017,运行LabVIEW2017。此时,LabVIEW对话框将会出现。
2. 菜单栏点击“帮助”按钮,在下拉菜单中点击“查找范例(E)”,帮助文档将会显示所有可用的LabVIEW样本VI并提供清单及链接。
3. 点击“创建用户界面”>>“生成2D图片”,然后找到“二维系列机器人动画”,“二维系列机器人动画”VI前面板将会出现。
注意: 您也可以通过点击菜单栏“文件”>>“打开”按钮并导引至” C:\Program Files (x86)\National Instruments\LabVIEW 2017\examples\Graphics and Sound\2D Picture Control\2D Serial Robot ANImation.vi”打开VI.
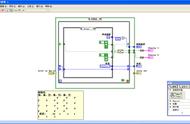
前面板
4. 点击在工具栏上 “运行”按钮,如下图所示,以运行该VI

运行按钮
该VI演示了使用二位图片空间动画演示机器人手臂的方法,
- 通过调节基座位置X和基座位置Y滑动杆,
- 通过调节A长度和B长度滑动杆,定义手臂的大小
- 通过调节A关节/B关节/C关节旋钮,实时的控制图片上机械手3轴的位置
- 通过调节签字开口滑动杆,打开和关闭签字,如下示例图所示。

二维系列机器人动画 VI
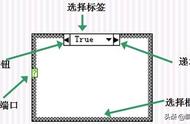
5. 使用操作工具,如下图所示,以改变幅度变换滑块或旋钮上面的值。点击按钮并将它拖拽至您想要它显示的地方,使用增加或减少箭头,或者将光标放到数字显示的地方直接改写数字。