在实际工作中,如何确定减速机的速比呢?
首先就要学习蜗轮蜗杆的工作原理。
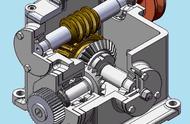
蜗杆传动属于齿轮传动的一种,是用来传递空间交错轴之间的运动和动力,常用的是两轴交错角∑=90°的减速传动。
它的工作原理:蜗轮蜗杆传动的两轴是相互交叉垂直的;
蜗杆可以看成为在圆柱体上沿着螺旋线绕有一个齿(单头)或几个齿(多头)的螺旋,蜗轮就像个斜齿轮,但它的齿包着蜗杆。在啮合时,蜗杆转一转,就带动蜗轮转过一个齿(单头蜗杆)或几个齿(多头蜗杆);蜗杆一般采用2个头,特殊的有4个头。
其次如何计算速比:需要清楚蜗轮的齿数和蜗杆的头数。
减速比I=蜗轮齿数Z2/蜗杆头数Z1。(蜗杆头数取值有1、2、4、6,当取小值时,其传动比大,且具有自锁性;当取大值时,传动效率高)、(齿轮模数一般为2.5-5)
具体请参考如下推荐值
蜗杆头数Zl与蜗轮齿数Z2及传动比i之间的推荐值
传动比(i=Z2/Z1) | 蜗杆头数(Z1) | 蜗轮齿数(Z2〉 |
6.5-10 | 4 | 26 -40 |
9-13 | 3-4 | 27 -52 |
14-24 | 2-3 | 28 -72 |
25 -27 | 2-3 | 50 -81 |
28 -40 | 1-2 | 28 -80 |
≥40 | 1 | ≥40 |
蜗轮、蜗杆的计算公式:
- 传动比=蜗轮齿数÷蜗杆头数
- 中心距=(蜗轮节径 蜗杆节径)÷2
- 蜗轮后径=(齿数 2) ×模数
- 蜗轮节径=模数×齿数
- 蜗杆节径=蜗杆外径-2×模数
- 蜗杆导程=π x模数×头数
- 螺旋角(导程角)tgB=(模数x头数)÷蜗杆节径